一、前言
1、概述
GCAN-ISM系列總線型低壓交流伺服一體機(以下簡稱GCAN伺服電機),是廣成科技有限公司根據社會發展及市場需求推出的一款高性能、高穩定性產品,GCAN伺服電機驅動器與電機一體,電機采用永磁同步電機,驅動器采用低壓直流電源供電,具有體積小、外形規整便于安裝、組網方便等特點,支持CANopen總線控制方式。可廣泛應用于AGV、物流、醫療設備、車載設備、雕刻機、貼片機、噴繪機、紡織機械等對電壓及體積有較高要求的領域。
2、特點
(1)支持CAN總線接口:包括CANOPEN協議;
(2)位置/速度/轉矩/回零控制等,模式切換;
(3)保護功能:欠壓、過壓、過流、超載、失速、位置超差等;
(4)高度集成,使用直接快速接插端子,使用方便可靠;
(5)獲得CE、高低溫等測試認證。
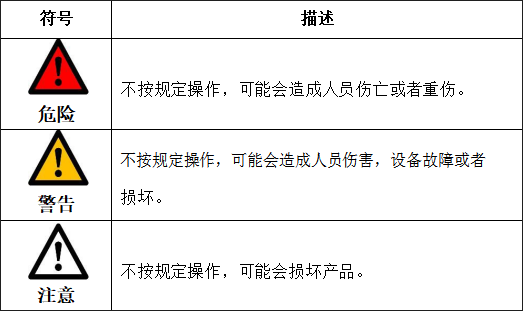
3、符號描述
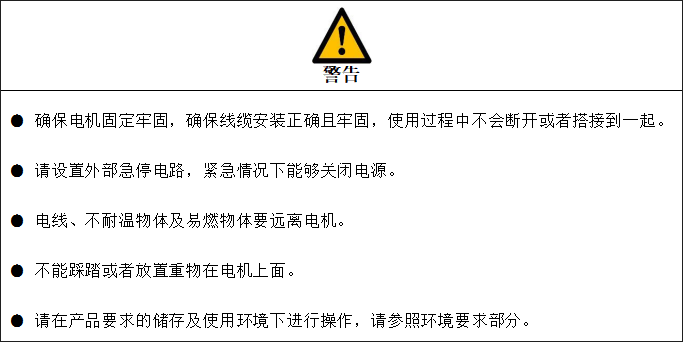
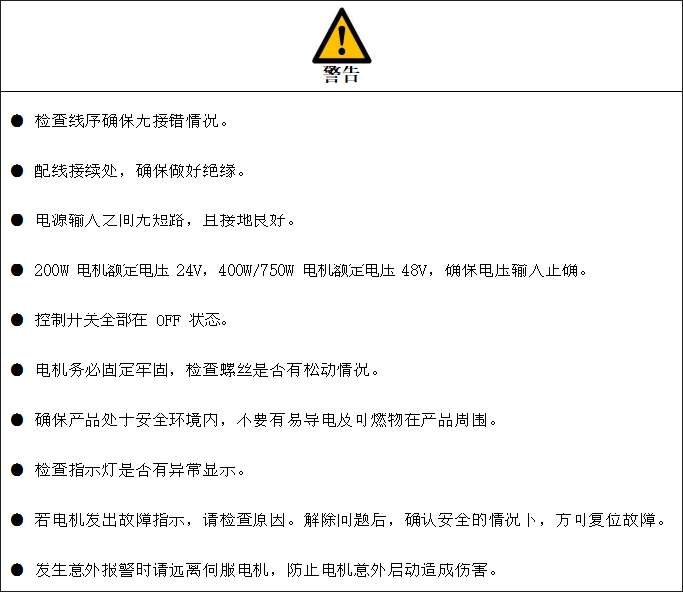
4、注意事項
使用前請仔細閱讀下列注意事項,確保按照規范進行操作。
二、產品檢查與型號
1、產品檢查
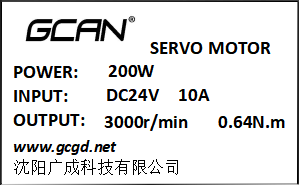
銘牌內容如下所示:
1.200W電機銘牌
2.400W電機銘牌
3.750W電機銘牌
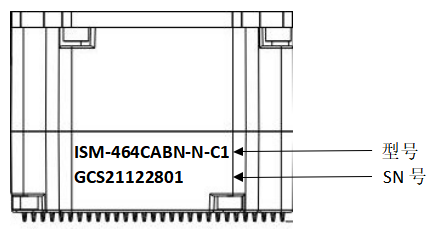
● 外殼打印的型號標志是否與購買的產品對應(可見型號參數對照表)。外殼標志如下圖
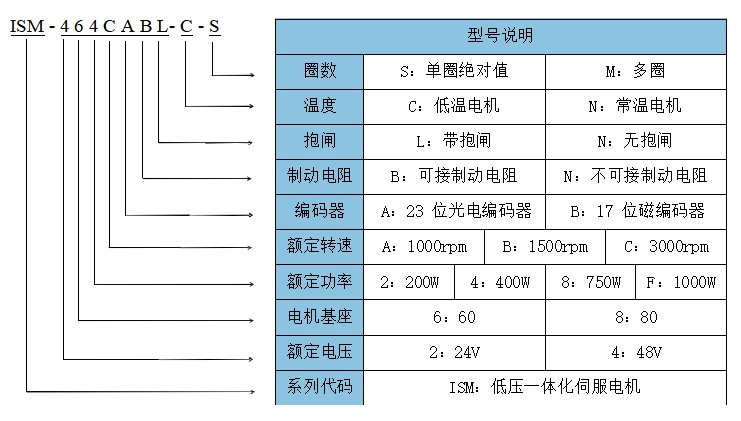
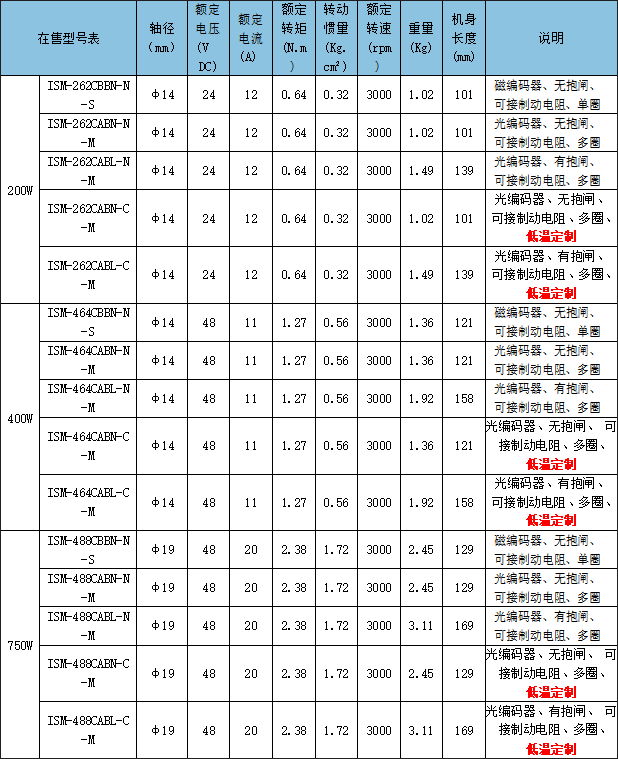
2、型號說明
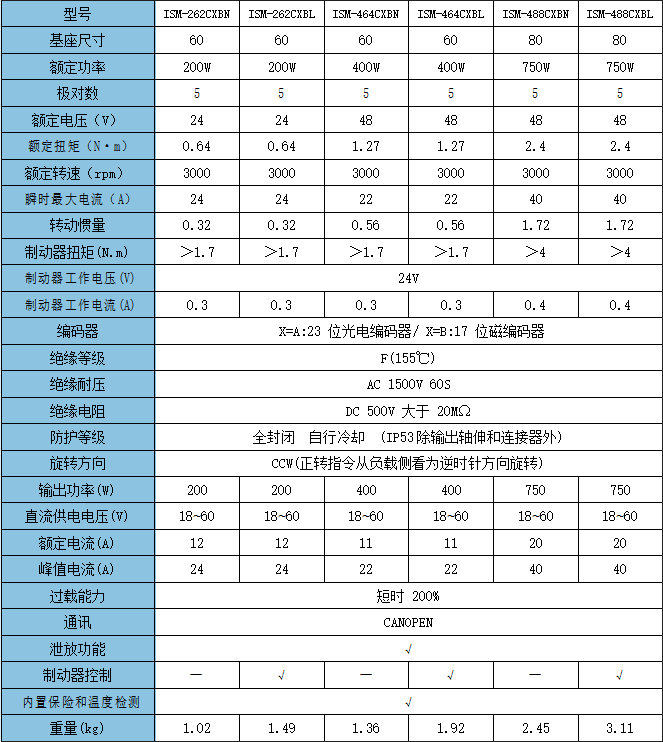
3、型號參數對照表
三、安裝說明
1、安裝注意事項
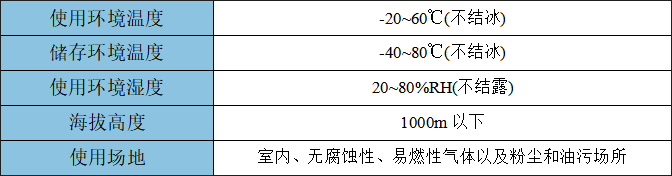
2、環境要求
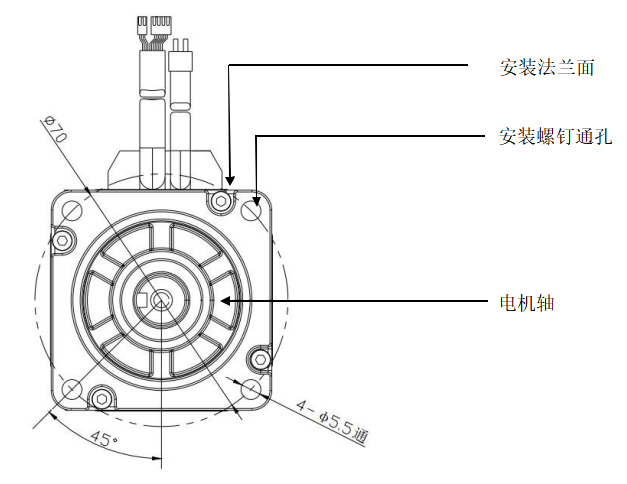
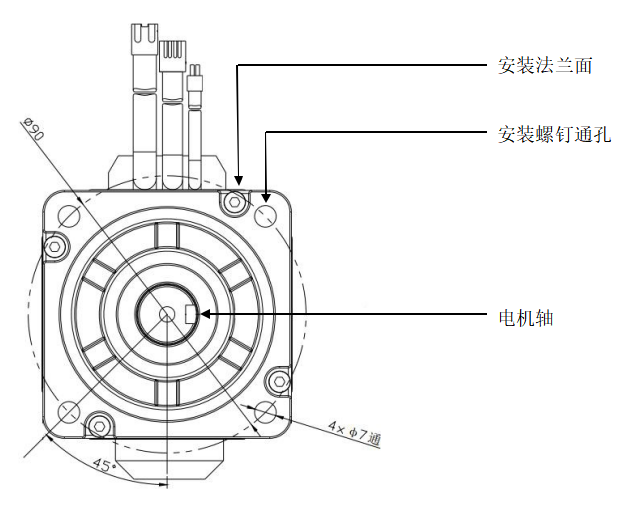
3、安裝形式
安裝形式:法蘭安裝
法蘭孔徑尺寸如下圖
200W/400W(60基座):
750W(80基座):
4、接線注意事項
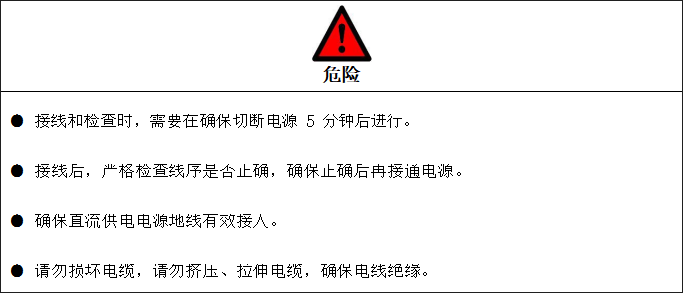
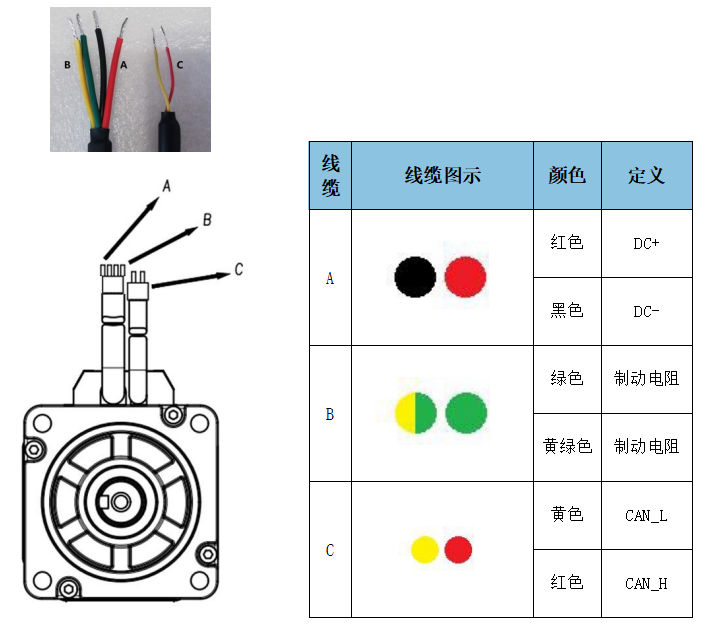
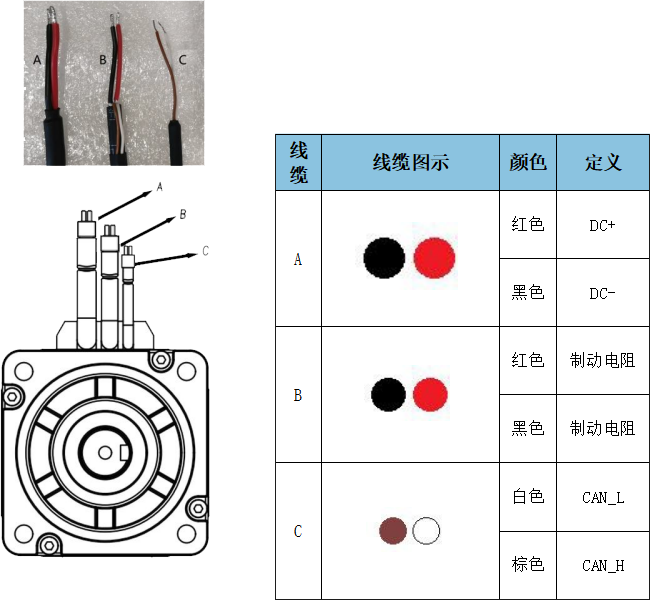
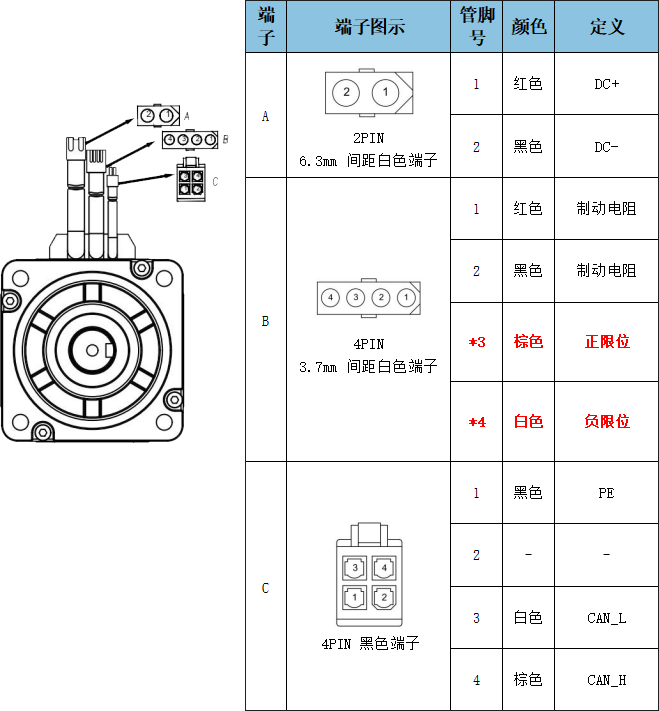
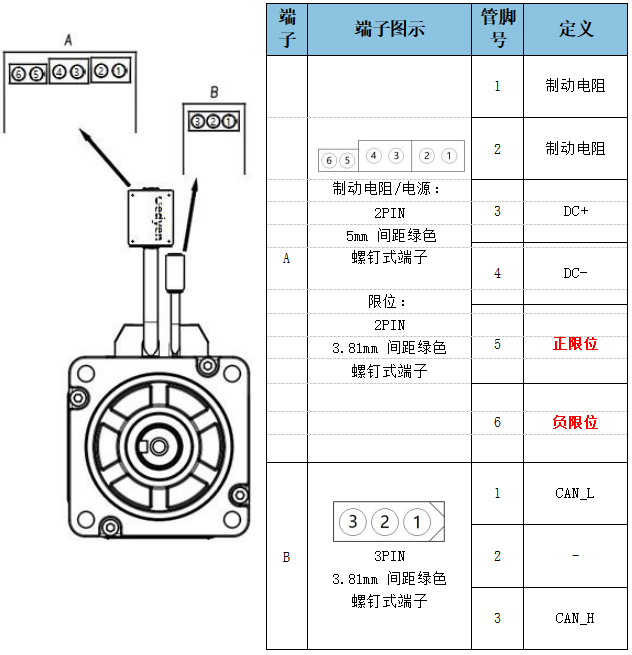
5、線纜/端子定義
制動電阻的選型:
(1)電阻功率(瓦):電機瓦數*(30%---50%);
(2)制動電阻值(歐姆):2500/電阻功率;(超過30Ω取30Ω)。
200W伺服電機,推薦制動電阻的最小功率為60W,電阻值最大30Ω;
400W伺服電機,推薦制動電阻的最小功率為120W,電阻值最大約20.8Ω
750W伺服電機,推薦制動電阻的最小功率為225W,電阻值最大約11Ω。
200W/400W線纜版:產品序列號GCS22063001之前產品無限位檢測,默認為線纜版,可根據客戶需求進行定制。對應生產日期22年06月30日。
200W/400W端子版:產品序列號GCS22063001之后產品帶限位檢測,默認為端子版,可根據客戶需求進行定制。對應生產日期22年06月30日。
750W線纜版:產品序列號GCS22063001之前產品無限位檢測,默認為線纜版,可根據客戶需求進行定制。對應生產日期22年06月30日。
750W端子版:產品序列號GCS22063001之后產品帶限位檢測,默認為端子版,可根據客戶需求進行定制。對應生產日期22年06月30日。
接線盒帶防護版:添加相關防護,減少產品可能受到外部產生的傳導干擾、靜電放電等的影響。
四、技術參數
1、產品詳細技術參數
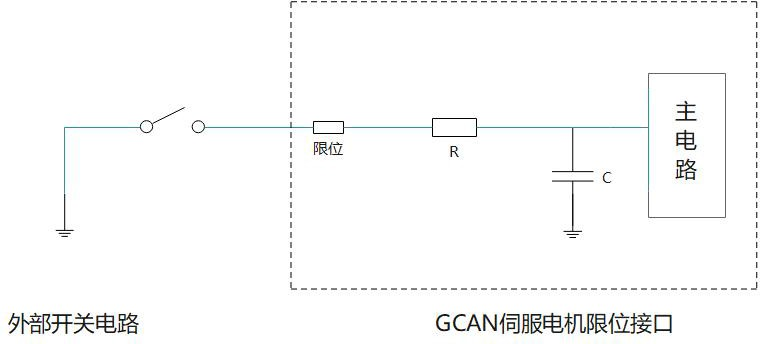
2、限位開關接線圖
(1)限位開關:
開關一端接對應端子的限位管腳,開關的另一端與電源負極相連。
棕色:接正限位開關;
白色:接負限位開關。
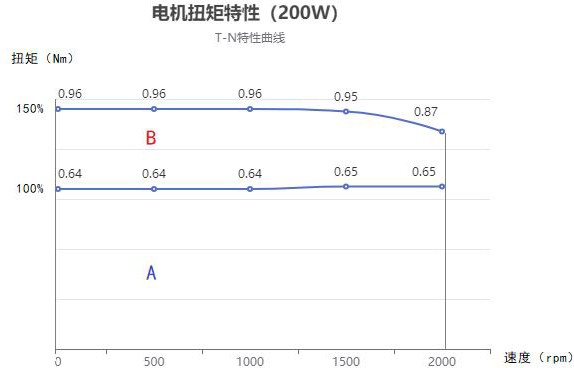
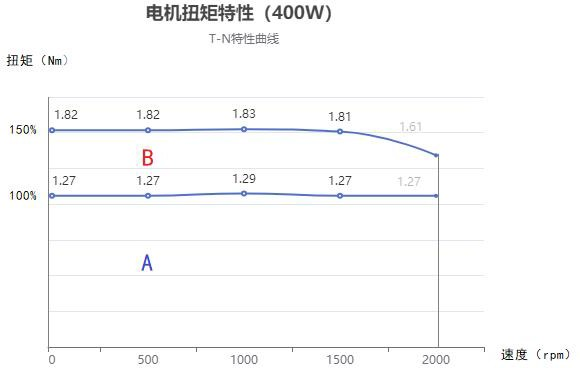
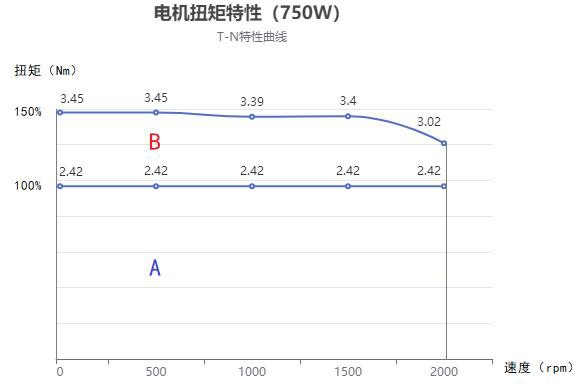
3、轉矩-轉速特性曲線
(注:A區為連續使用區域,B區為瞬時使用區域)
200W電機轉矩-轉速特性曲線:
400W電機轉矩-轉速特性曲線:
750W電機轉矩-轉速特性曲線:
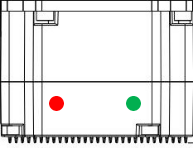
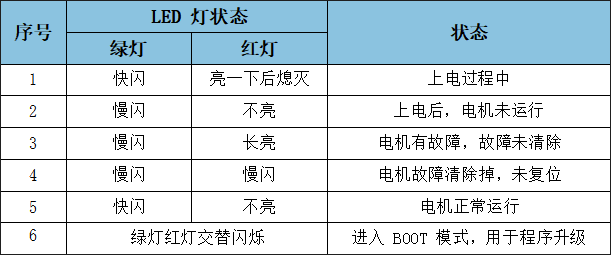
4、指示燈狀態及定義
指示燈狀態及定義,如下表所示
5、通訊設置
CAN總線波特率及CAN總線節點號可通過隨貨使用配套軟件或者使用CANopen協議CiA DSP 305子協議中介紹的LSS功能進行配置。
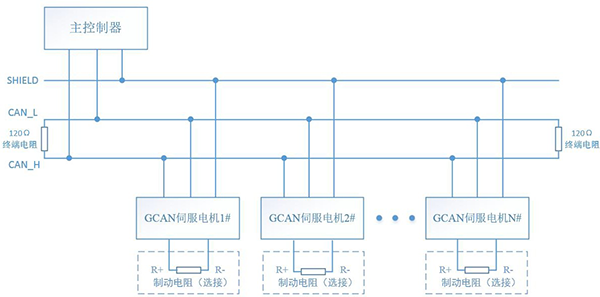
6、組網連接圖
五、電機測試(JOG)
建議電機先進行空載操作,試轉沒問題后,再加入負載進行操作,若試轉過程中,電機噪音過大,抖動過大,或者有任何報警情況,請與廠家聯系。
1、JOG注意事項
請按照下表逐一檢查,以防止操作不當造成產品及人員的損傷。
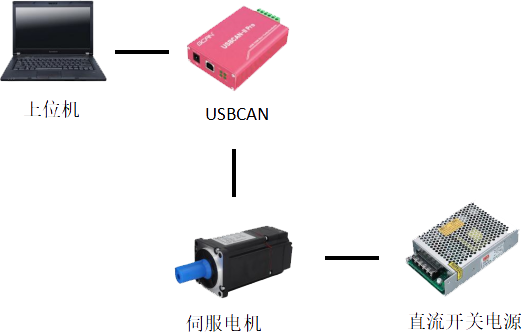
2、設備連接
產品按照下圖連接好,再打開上位機軟件進行調試。
注:請使用沈陽廣成科技的USBCAN設備進行調試。
3、軟件介紹
CANopen伺服測試工具基于Windows平臺,需配套廣成科技USBCAN系列產品或廣成科技GCAN-211網關使用,用來配置和調試廣成科技GCAN伺服電機。
雙擊圖 即可進入設備連接界面
即可進入設備連接界面
注:在軟件中,所有的灰色部分為不可變更項。
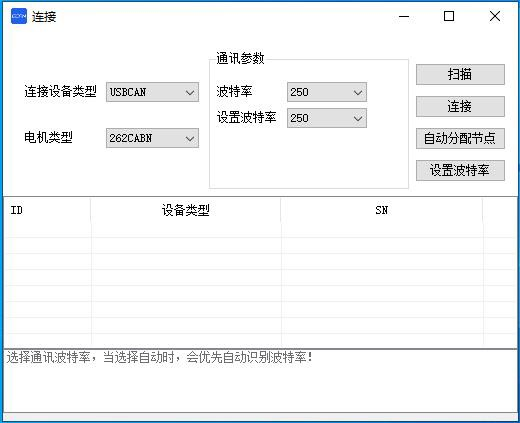
連接界面如下圖所示:
● 連接設備類型:目前支持兩種設備控制伺服電機,一種USBCAN,一種GCAN-202/211。
● 電機類型:選擇電機類型,只“掃描”對應的電機類型;選“ALL”,則“掃描”所有的電機類型。
● 通訊參數:波特率:當前在線的伺服電機CAN總線波特率。
● 通訊參數:設置波特率:需要設置的CAN總線波特率。
● 掃描:掃描當前CAN總線中在線的伺服電機。
● 連接:連接“下方設備信息欄”選中的伺服電機。
● 自動分配節點:按照設備類型、SN號從1開始依次分配節點ID(需先掃描設備)。
● 設置波特率:按照“通訊參數-設置波特率”設置波特率(需先掃描設備)。
● 下方設備信息欄:顯示掃描出的當前總線中在線的伺服電機信息。
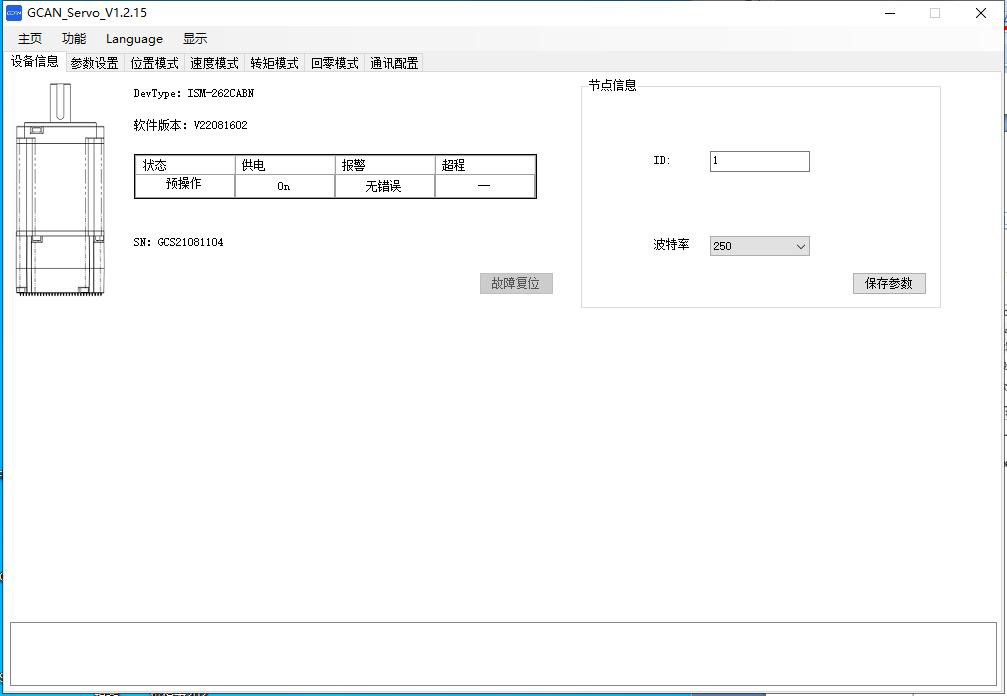
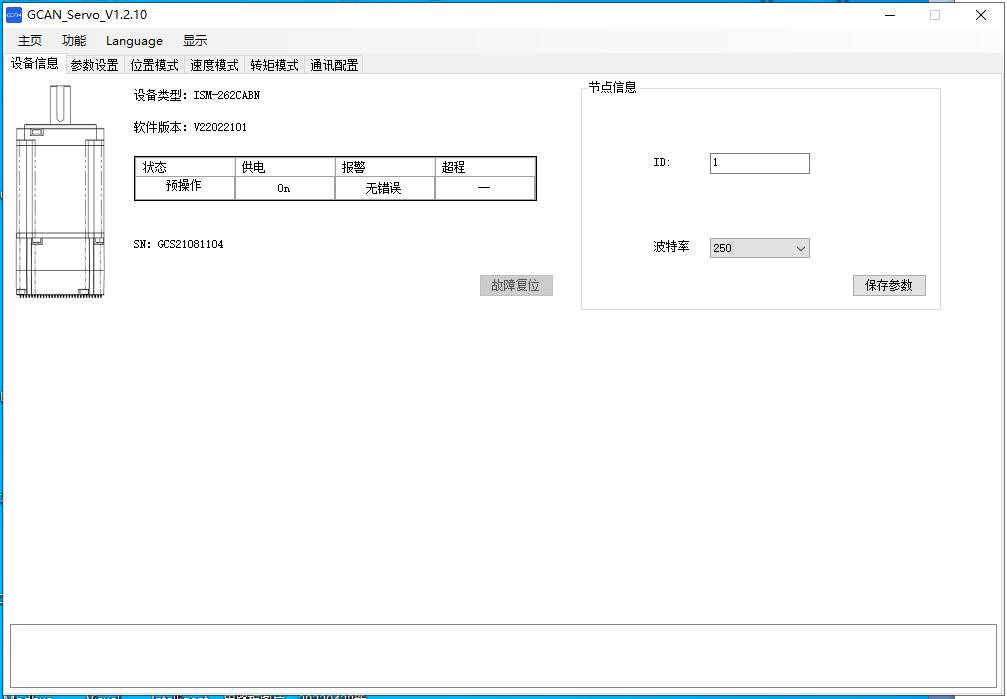
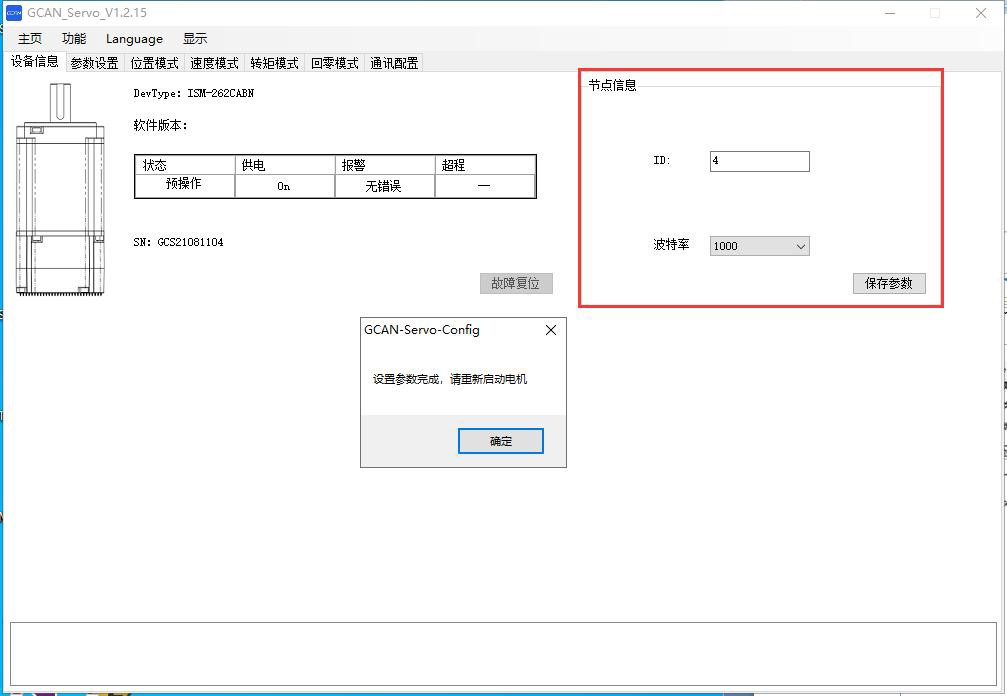
設備信息選項卡如下圖所示:
● DevType:顯示當前在線伺服電機類型。
● 軟件版本:顯示當前在線伺服電機軟件版本。
● 狀態:顯示當前設備狀態,包括(CANopen狀態,供電狀態,報警狀態和超程報警)。
● SN:顯示當前當前在線伺服電機SN號碼。
● 節點信息-ID:修改當前選擇節點的節點號。
● 節點信息-波特率選擇框:修改當前選擇節點的波特率。
● 保存參數:將當前選中節點信息寫入。
● 故障復位:清除當前電機存在的故障。主頁菜單欄如下圖所示:
● 退出:退出軟件,斷開連接。
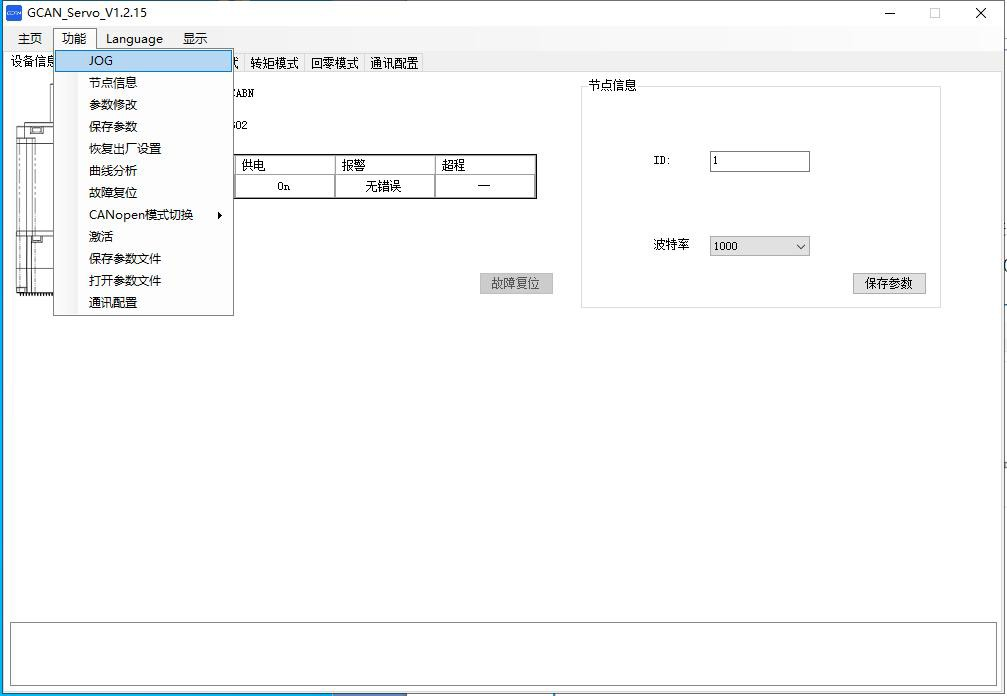
功能菜單欄如下圖所示:
● JOG:進入JOG點動運行模式。
● 節點信息:跳轉設備信息選項卡,顯示、修改節點信息。
● 參數修改:跳轉參數設置選項卡,修改伺服電機參數。
● 保存參數:將當前設置操作保存到伺服電機中(斷電后依然生效)。
● 恢復出廠設置:將伺服電機恢復默認配置。
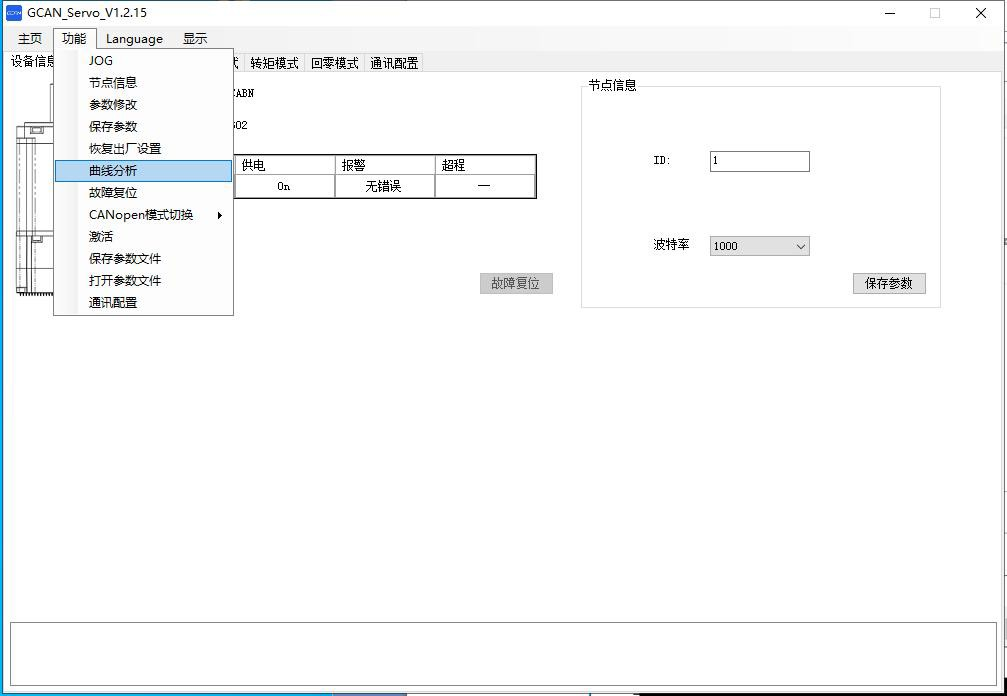
● 曲線分析:顯示當前速度曲線。
● 故障復位:清除當前電機存在的故障。
● CANopen模式切換:CANopen模式切換:啟動模式、停止模式、預操作模式、復位節點、復位通訊。
● 保存參數文件:將當前伺服電機配置保存至電腦。
● 打開參數文件:將電腦的配置文件下載至伺服電機中。
● 通訊配置:跳轉通訊配置選項卡,通訊配置。
Language菜單欄如下圖所示:
● 簡體中文:軟件語言切換至簡體中文。
● English:軟件語言切換至English。
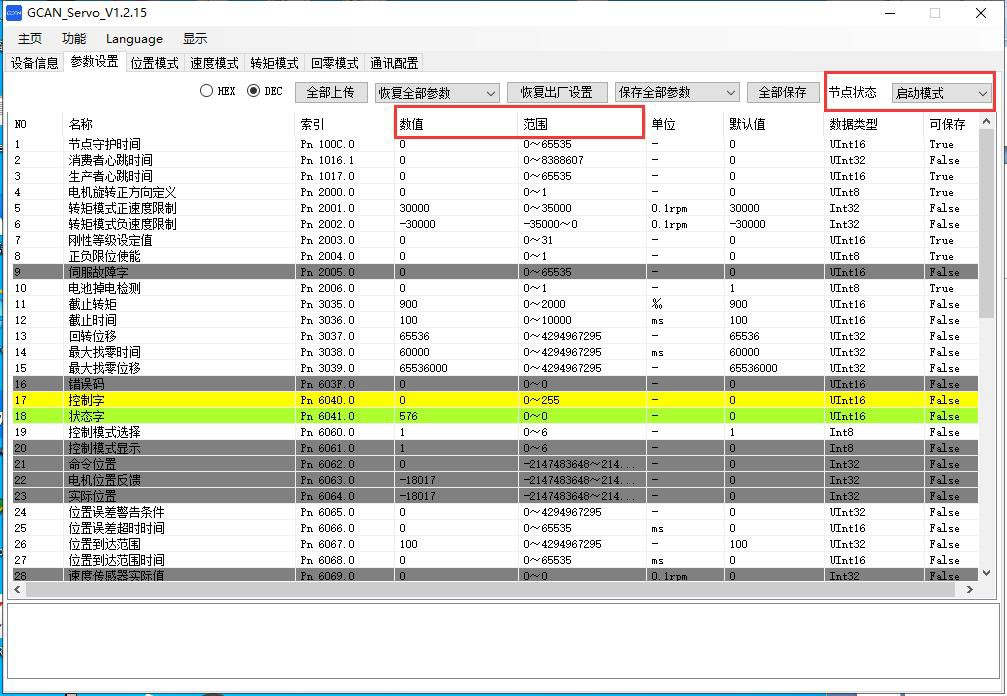
參數設置選項卡如下圖所示:
● HEX/DEX:16進制,10進制切換。
● 全部上傳:讀取當前電機全部數據。
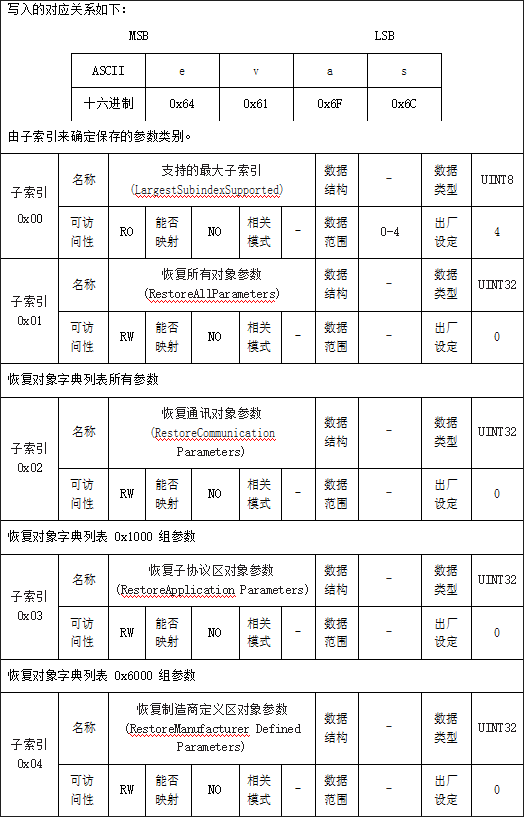
● 恢復全部參數:下拉選“恢復全部參數”,“恢復通訊對象”,“恢復子協議區對象”,“恢復制造商定義區對象”。
● 恢復出廠設置:左側下拉選按鈕選擇完畢,對應參數恢復出廠設置。
● 保存全部參數:下拉選“保存全部參數”,“保存通訊對象”,“保存子協議區對象”,“保存制造商定義區對象”。
● 全部保存:左側下拉選按鈕選擇完畢,將對應配置參數寫入電機內部。
● 節點狀態:節點狀態切換:啟動模式、停止模式、預操作模式。
● 信息列表:顯示電機信息。
● 完整信息:顯示當前選中信息的完整內容。
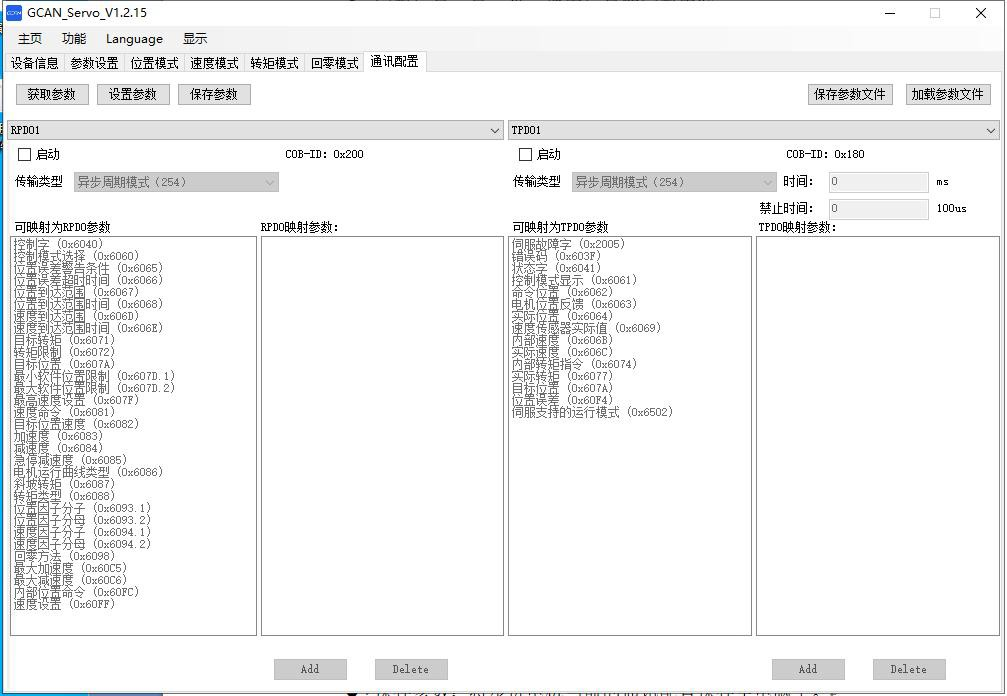
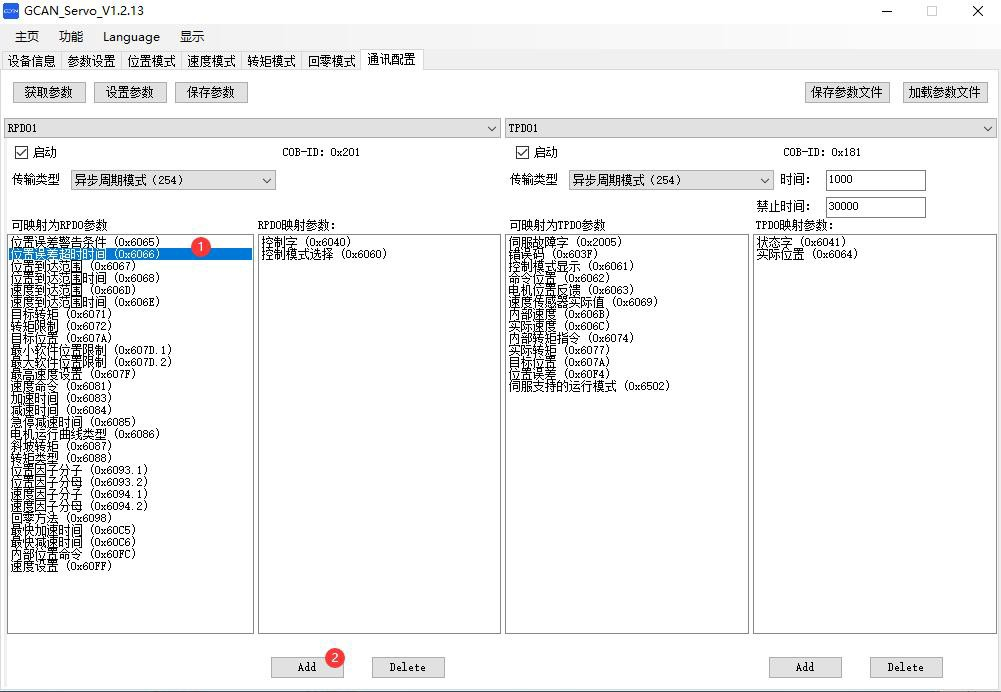
通訊配置選項卡如下圖所示:
● 獲取參數:獲取伺服電機當前的通訊配置。
● 設置參數:將配置好的通訊參數下載至伺服電機中,斷電失效。
● 保存參數:將配置好的通訊參數下載至伺服電機中,斷電保存。
● 保存參數文件:將伺服電機當前的通訊配置保存至電腦中。
● 加載參數文件:將電腦的通訊配置文件下載至伺服電機中
4、設備調試
(1)JOG操作
使用GCAN-Servo-Config,需要先連接上一臺伺服電機。
1.在GCAN-Servo-Config主窗口中選擇“功能→JOG”。
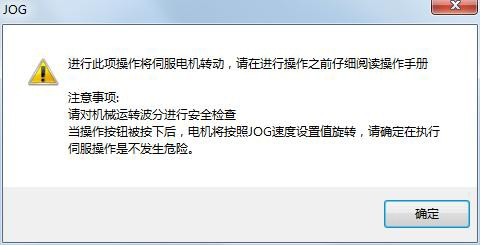
2.請仔細閱讀并遵循對話框內的注意事項,然后點擊“確定”。
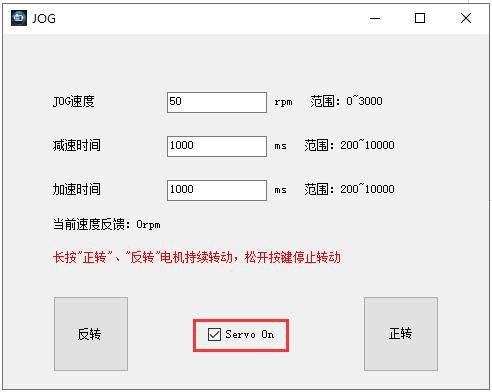
3.在彈出的“JOG”對話框中設定如下參數。
JOG速度:設定電機運行的速度。
加速時間:設定電機開始加速運行至設定速度時間。
減速時間:設定電機開始減速運行至設定速度時間。
4.勾選“Servo On”,使電機使能。
5.點擊“正轉”或“反轉”,使電機開始轉動。
按住“正轉”或“反轉”,能夠使電機持續轉動,并在松開鼠標按鍵時停止轉動。
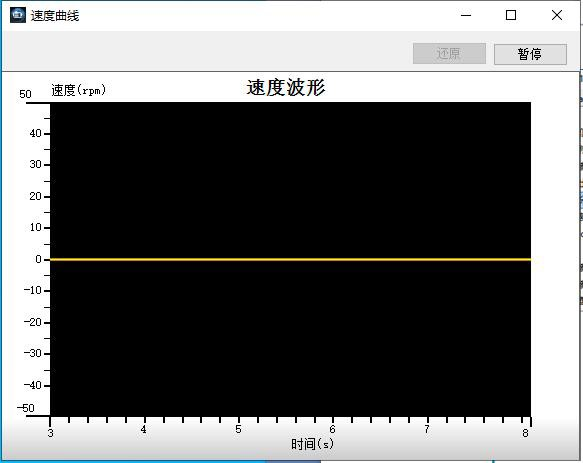
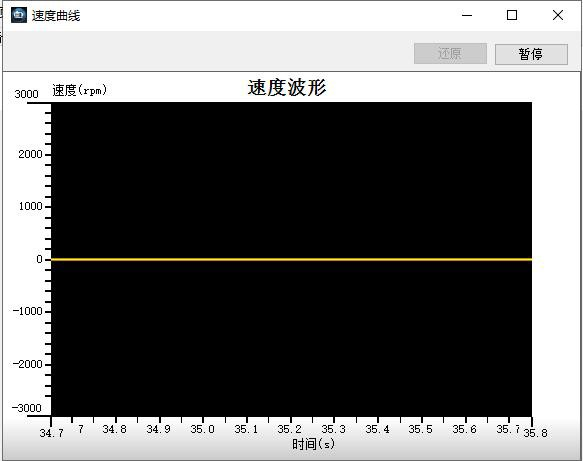
(2)曲線分析
1.在GCAN-Servo-Config主窗口中選擇“功能→曲線分析”。注:本功能需上位機軟件更新至V1.2.14版本及以上。
2.速度曲線默認如圖所示。
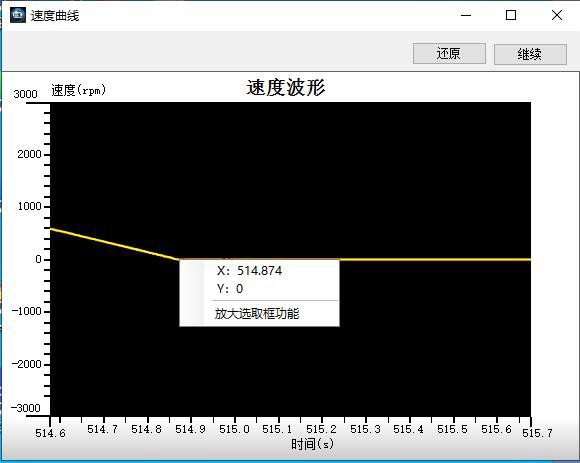
3.鼠標滑輪可調節波形的X軸,CTRL+鼠標滑輪可調節波形的Y軸。右上角“暫停”鍵暫停當前波形顯示。
4.鼠標右鍵單擊波形,可顯示當前點坐標。右上角“繼續”鍵繼續波形顯示,“還原”鍵還原放大的波形。
(3)修改節點信息
修改1號節點,將ID修改成4,波特率修改為1000K。
點擊保存參數,設置完成重啟電機生效。
(4)參數設置
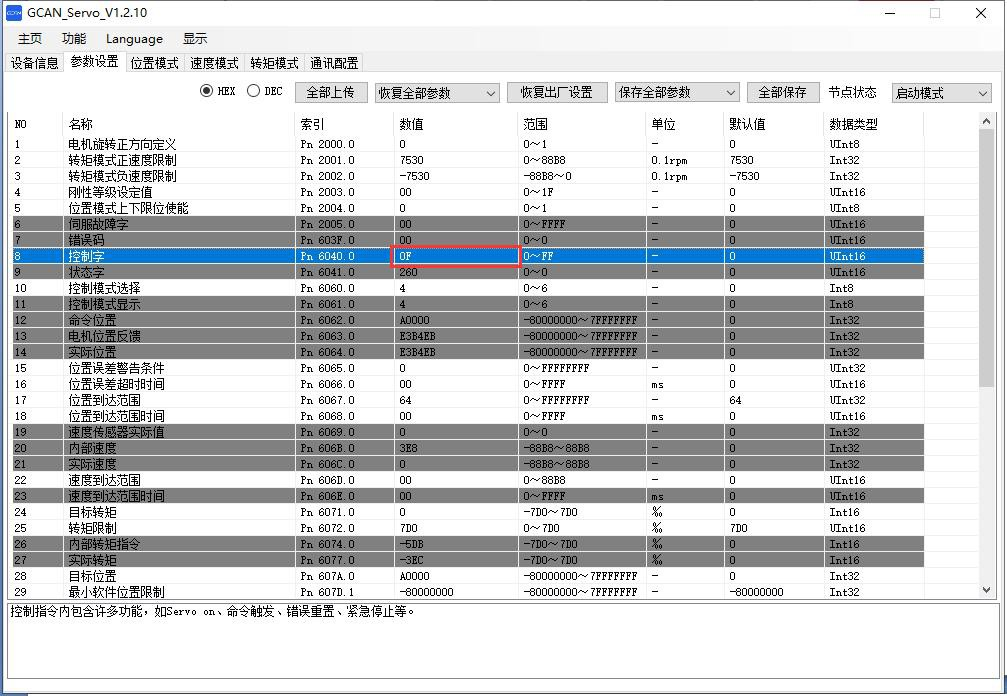
修改伺服電機參數,點擊“全部上傳”獲取伺服電機當前參數,選擇HEX即16進制顯示或DEC即10進制顯示。
鼠標左鍵單擊對應數值后即可修改,請注意數值范圍,灰色對象字典不可修改,數值修改后鍵盤敲擊回車鍵或鼠標單擊其他位置生效。“通訊配置”頁,獲取或設置電機的通訊配置后,映射過RPDO的對象背景顏色黃色,例如NO17的Pn 6040.0控制字;映射過TPDO的對象背景顏色綠色,例如NO18的Pn 6041.0狀態字。如需修改映射過的對象數值,節點狀態需切換至“啟動模式”后修改數值生效。
(5)通訊配置
修改伺服電機的PDO過程數據映射。點擊獲取參數:獲取伺服電機當前的通訊配置。
請注意:獲取或設置電機的通訊配置后,映射過PDO的對象在“參數設置”及四種“運行模式”標簽頁背景顏色黃/綠色顯示;在“參數設置頁”如需修改數值,節點狀態需切換至“啟動模式”后修改數值生效。
下拉選想要配置的RPDO或TPDO,勾選“啟動”后開始配置。傳輸類型處可選“異步周期”或“異步觸發”模式,TPDO的周期可設置。
TPDO的傳輸類型為異步周期模式(254)時,TPDO會按固定時間間隔上報數據,參數為“時間”,單位ms。如上圖,TPDO會以每1000ms一次上報TPDO數據。
TPDO的傳輸類型為異步觸發模式(255)時,當數據保持不變時,TPDO會按照參數“時間”設定的時間間隔上報數據,當數據發生變化時,TPDO會按照參數“禁止時間”設定的時間間隔上報數據。參數“時間”,單位ms;參數“禁止時間”,單位0.1ms。如上圖,當狀態字與實際位置不發生變化時,TPDO會以每1000ms一次上報TPDO數據,當狀態字和實際位置發生變化時,TPDO會以每3000*100*0.1ms=300ms一次上報TPDO數據。
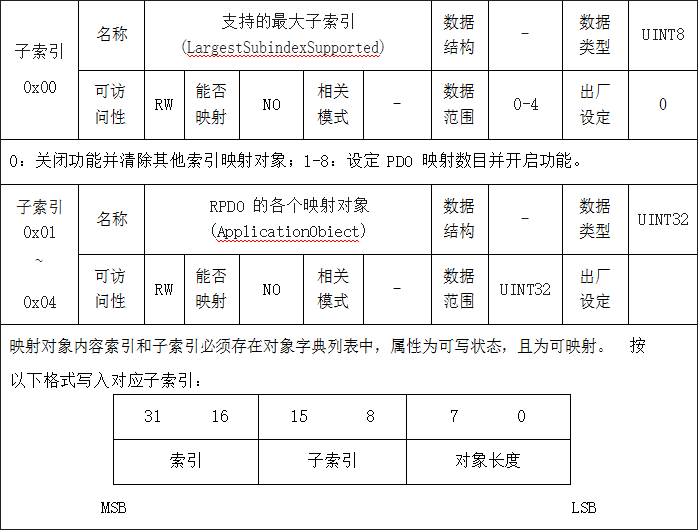
單擊“可映射為PDO參數”列,選擇想要配置的映射參數后,點擊“Add”即可將其配置為對應的映射參數:
一個PDO最多8個字節數據,故超過8個字節的映射會提示“超過允許映射范圍”,每個對象字典的數據類型請查看“參數設置”選項卡的數據類型。
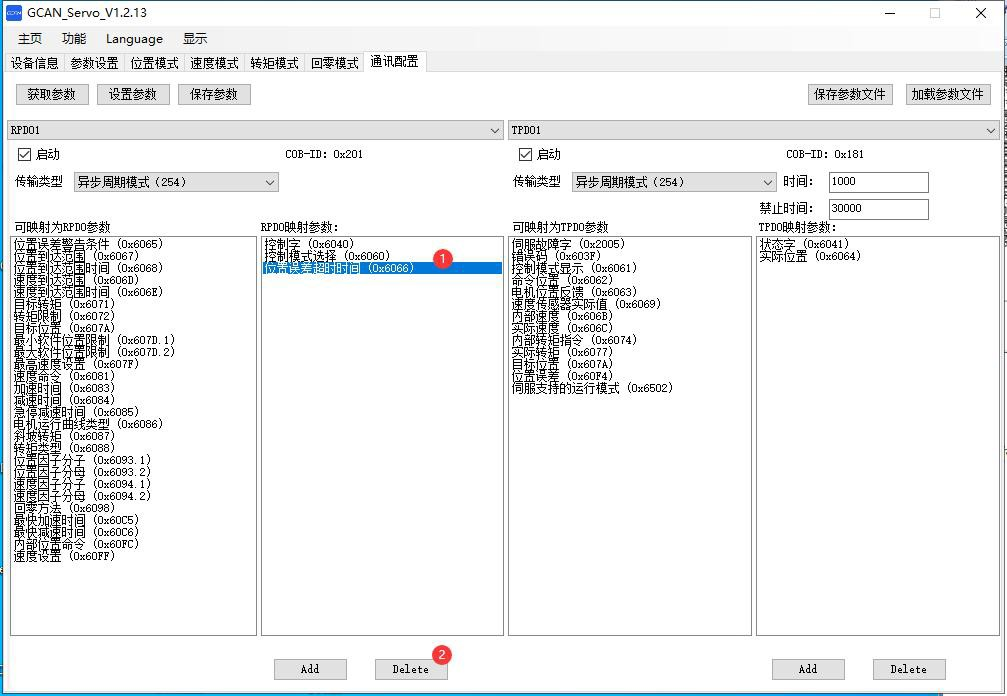
單擊“映射參數”列,選擇想要刪除的映射參數后,點擊“Delete”即可刪除對應的映射參數。
配置完成后,點擊“設置參數”,將配置好的通訊參數下載至伺服電機中,配置斷電后不保存。點擊“保存參數”,將配置好的通訊參數下載至伺服電機中,配置斷電后保存。
六、CANopen概述
CANopen是一個基于CAN(控制局域網)串行總線系統和CAL(CAN應用層)的高層協議。CANopen假定相連設備的硬件帶有一個符合ISO 11898標準的CAN收發器和一個CAN控制器。
CANopen通訊協議CiA DS-301包括周期和事件驅動型通訊,不僅能夠將總線負載減少到最低限度,而且還能確保極短的反應時間。它可以在較低的波特率下實現較高的通訊性能,從而減少了電磁兼容性問題,并降低了電纜成本。
CANopen設備協議定義了直接訪問變頻器參數機制以及時間關鍵進程數據通訊。NCAN-02滿足CiA(自動化中的CAN)標準DSP-402(變頻器和運動控制),只支持“制造商專用”操作模式。
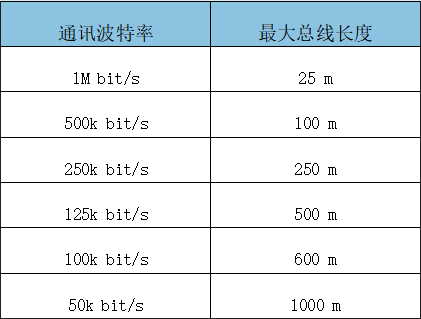
CANopen所用的物理介質是符合ISO 11898標準,采用分驅動機制和公共反饋的雙線總線。總線的最大長度取決于通訊速度,具體規定如下:
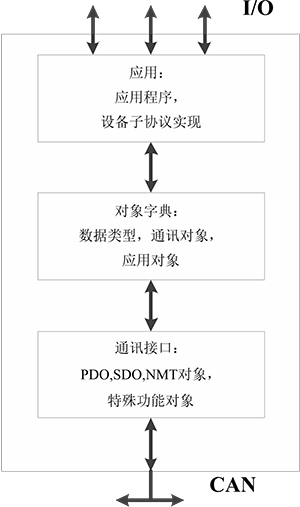
從理論上來說,最多可以有127個節點。不過,在實際應用中,最大節點數量取決于所用CAN收發器的性能。每個節點都是一個獨立的CANopen設備,而每個CANopen設備又可包含最多8個邏輯設備(logical device),對于伺服驅動器來說,每個邏輯設備對應一個其所控制的軸。一個CANopen設備的模型如下圖所示:
1、通信接口
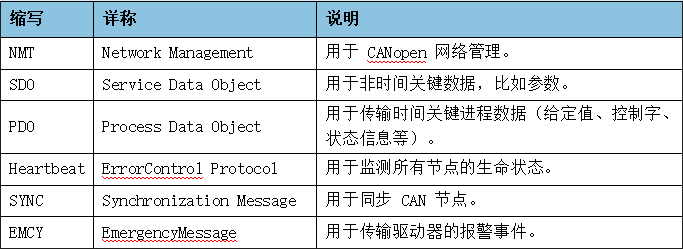
通訊接口主要定義了過程數據報文(PDO),服務數據報文(SDO),網絡狀態管理報文(NMT)以及其他相關報文怎么傳輸的協議。
2、對象字典
CANopen的核心概念是設備對象字典(OD:Object Dictionary),在其它現場總線(Profibus,INTerbus-S)系統中也使用這種設備描述形式。CANopen通訊通過對象字典(OD)能夠訪問驅動器的所有參數。注意:對象字典不是CAL的一部分,而是在CANopen中實現的。
對象字典中的對象可以通過一個已知的16位索引和一個8位子索引來識別,CANopen已經將對象字典進行了分類,如下表:
其中最常用到的對象有
(1)0x1000~0x1FFF,通信規范使用的對象。通過讀寫這些對象可以實現對網絡的配置,PDO映射等操作。
(2)0x2000~0x5FFF,制造商特定的對象。
(3)0x6000~0x9FFF,邏輯設備1-8的對象。屬于CIA 402設備子協議中對象,對這些對象的操作可以實現伺服驅動器的各種操作模式。
3、應用
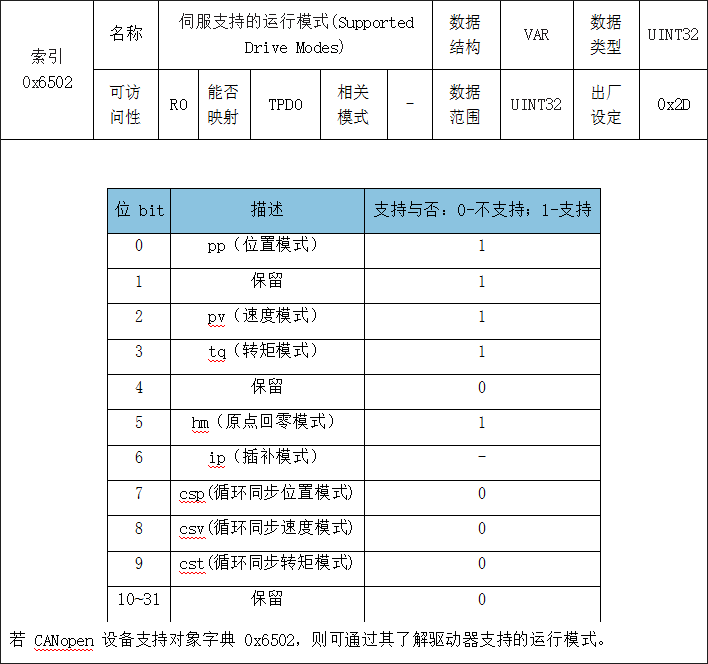
主要通過幾種操作模式(operation mode)來實現伺服電機各種參數的控制,以及實現一些其他的輔助功能。目前,EDS支持的操作模式主有:位置模式(Profile Position Mode)、速度模式(Profile Velocity Mode)、轉矩模式(Torque Mode)和回零模式(Homing Mode)。
七、CANopen通信
CAL提供了所有的網絡管理服務和報文傳送協議,但并沒有定義對象的內容或者正在通訊的對象的類型(它只定義了how,沒有定義what),而這正是CANopen切入點。
CANopen是在CAL基礎上開發的,使用了CAL通訊和服務協議子集,提供了分布式控制系統的一種實現方案。CANopen在保證網絡節點互用性的同時允許節點的功能隨意擴展:或簡單或復雜。
CANopen通訊模型定義了如下幾種報文(通訊對象):
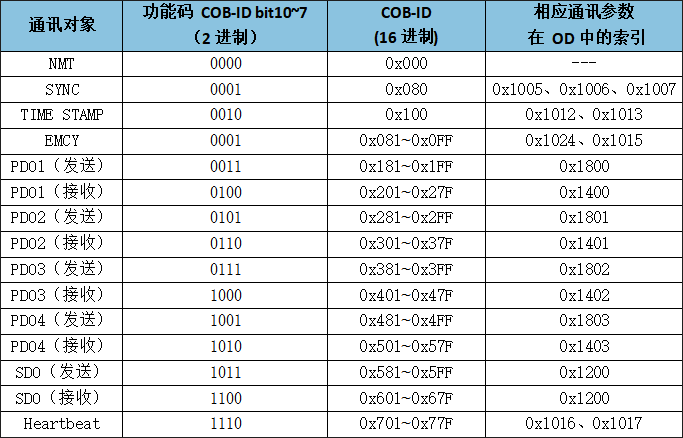
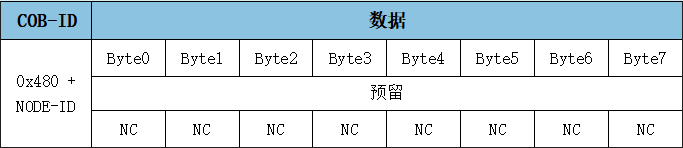
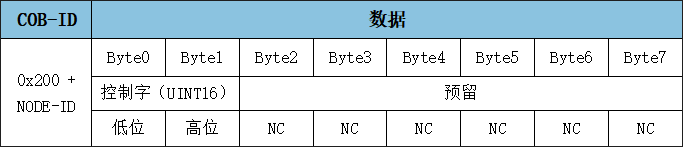
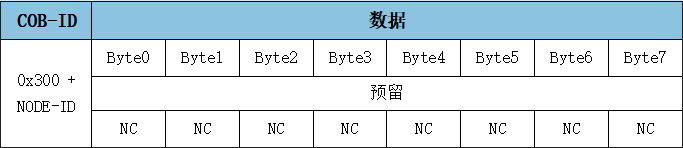
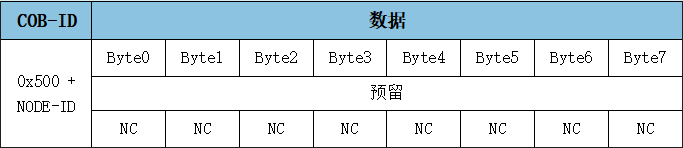
1、CAN標識符分配表
2、上電啟動報文
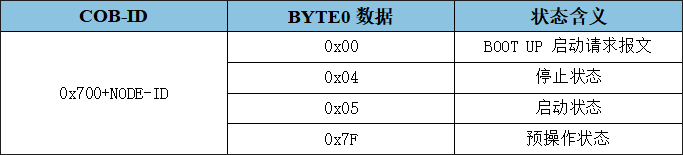
驅動器上電之后會向主站發送NMT節點上線報文,用于告知主機自己目前的狀態。
GCAN伺服電機當前節點號為1,上電發送BOOTUP啟動狀態,上報的節點上線報文如下圖,標準數據幀:
其中幀ID(COB-ID)為0x701,DLC數據長度為1個字節,數據為0x00。伺服NMT報文格式:
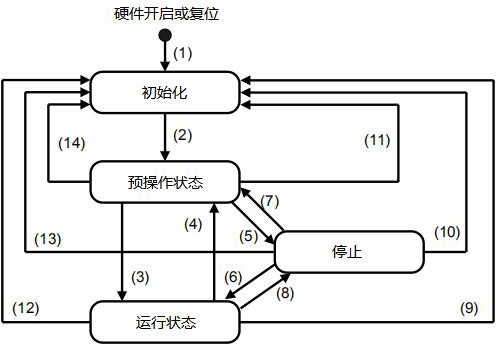
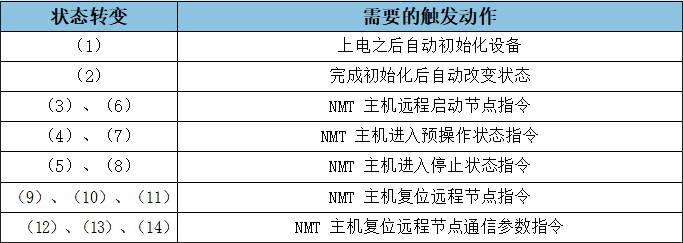
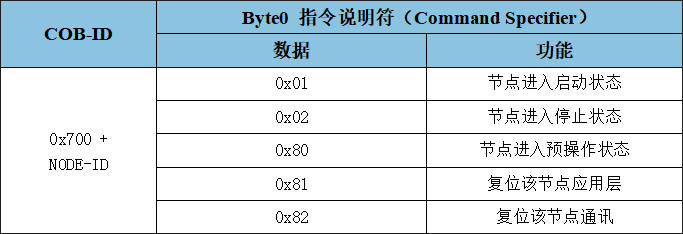
3、NMT狀態切換
NMT節點狀態切換命令
伺服驅動器從上電開始有6種狀態:
初始化(Initializing):伺服上電后對所有參數進行初始化。
應用層復位(ApplicationReset):伺服中的應用程序復位,如各開關量、模擬量輸出的初始化。
通訊復位(CommunicationReset):伺服中的CANopen通訊復位,復位之后節點可進行CANopen通訊。
預操作狀態:伺服的CANopen通訊處于操作就緒狀態,此時不能進行PDO通訊,僅能使用SDO進行參數配置和NMT網絡管理的操作。
操作狀態:伺服收到NMT主節點發來的啟動命令后,CANopen通訊被激活,可以進行PDO通信控制,SDO也可以進行數據傳輸及參數配置。
停止狀態:伺服收到NMT主節點發來的停止命令后,伺服的PDO通信被停止,僅能使用SDO進行參數配置和NMT網絡管理操作。
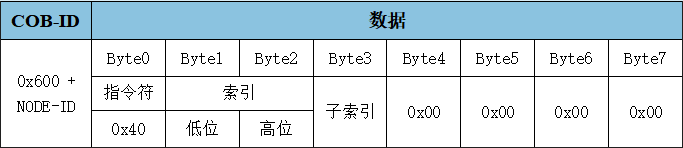
主機管理從機NMT報文格式:
NMT狀態邏輯圖:
4、服務數據對象SDO
服務數據對象SDO(ServiceDataObjects)主要用來訪問節點的對象字典,可以直接對GCAN伺服電機的參數進行讀寫配置。在伺服驅動器的調試過程中需要對驅動器的參數進行讀寫訪問,同時進行PDO配置,這些都需要通過SDO來完成。
(1)SDO讀取對象字典
SDO讀取命令:
被讀取的對象字典中數據類型的長度為8位時從機回復:
被讀取的對象字典中數據類型的長度為16位時從機回復:
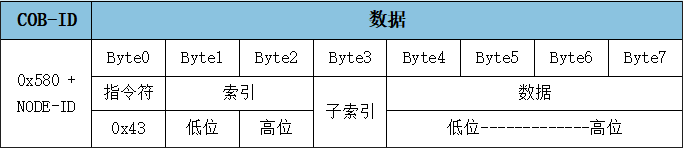
被讀取的對象字典中數據類型的長度為32位時從機回復:
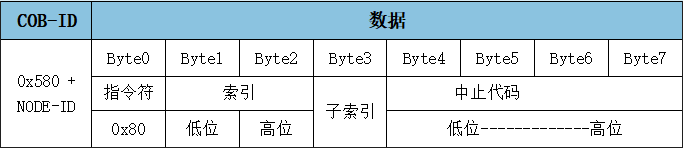
讀取錯誤時從機回復:
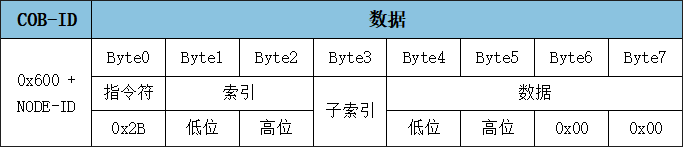
(2)SDO寫入對象字典
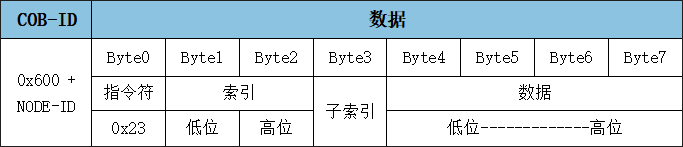
SDO寫入對象字典中數據類型的長度為32位參數命令:
SDO寫入對象字典中數據類型的長度為16位參數命令:
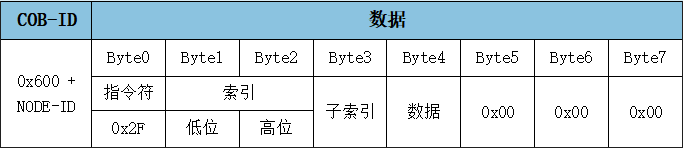
SDO寫入對象字典中數據類型的長度為8位參數命令:
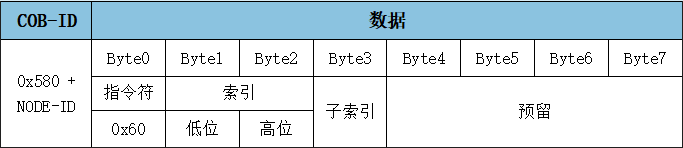
從機應答寫入對象字典的值寫入成功:
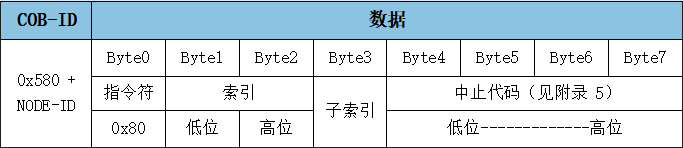
從機應答寫入對象字典的值寫入失敗:
5、過程數據對象PDO
PDO屬于過程數據,用來發送(TPDO)或者接收(RPDO)實時數據,例如電機的實時速度、位置、IO控制等,無需接收節點回應CAN報文來確認。數據可以從一個發送者發給一個或者多個接收者,一個PDO一次最多傳輸8個Byte的數據。
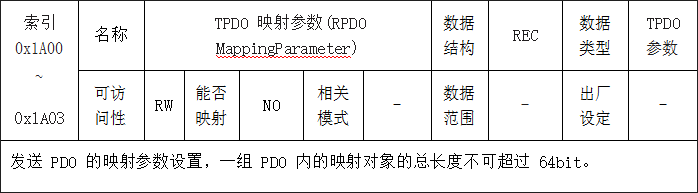
PDO所攜帶的實時數據類型和內容是由設備對象字典中所規定的該PDO映射結構決定。設備在預操作狀態(Pre-Operational State)期間支持動態PDO配置,通過服務數據對象SDO來進行PDO映射的配置。
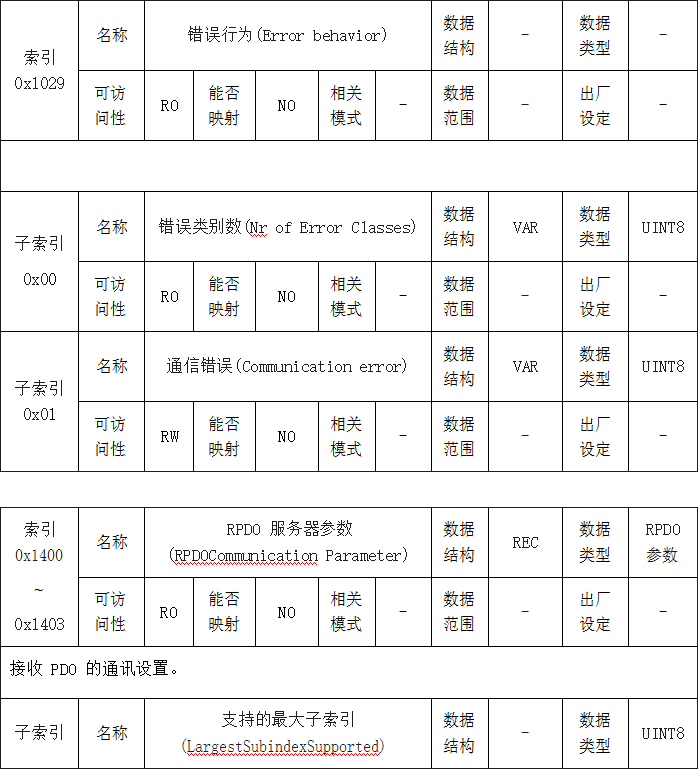
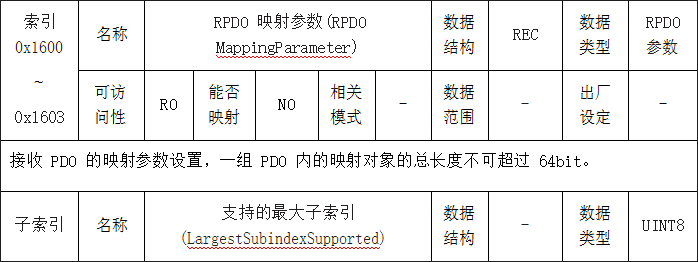
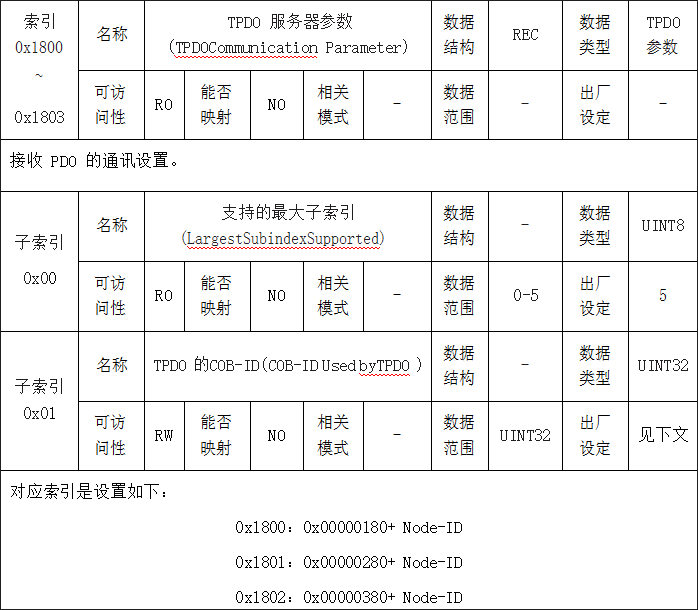
RPDO通訊參數0x1400到0x15FF,映射參數0x1600到0x7FF,數據存放為0x2000之后廠商自定義區域;TPDO通訊參數0x1800到0x19FF,映射參數0x1A00到0x1BFF,數據存放為0x2000之后廠商自定義區域。
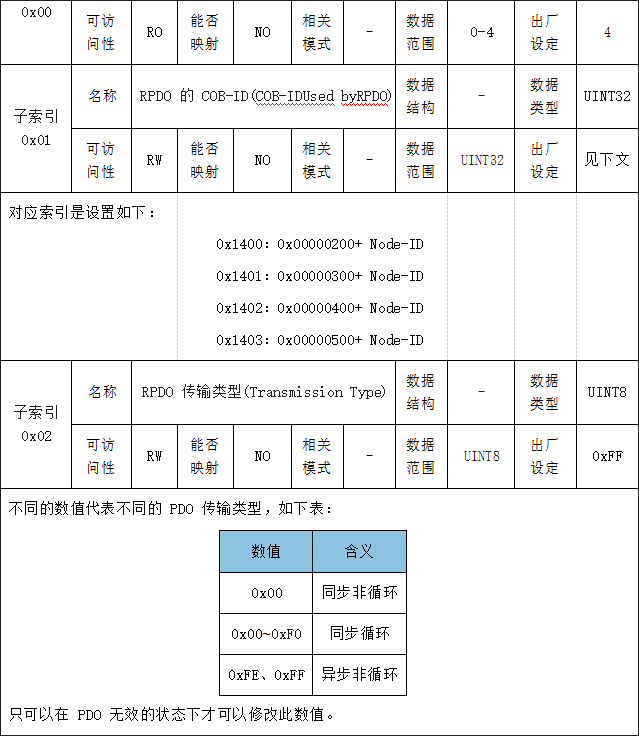
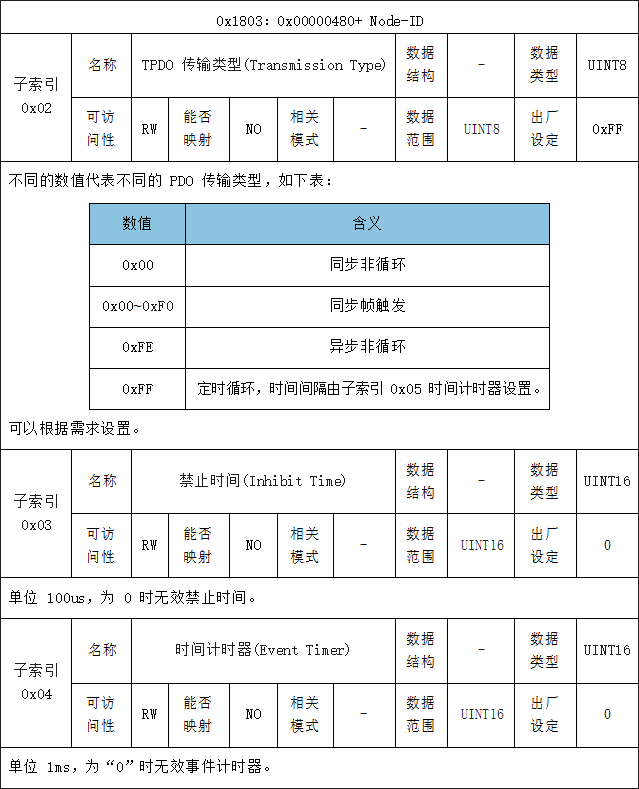
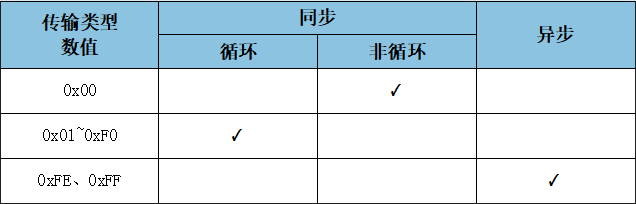
通信參數的子索引02不同的數值代表不同的傳輸類型,定義了觸發TPDO傳輸或處理收到的RPDO的方法,具體對應關系如下表所示:
● 當RPDO的傳輸類型為0~0xF0,只要接收到一個同步幀則將該RPDO最新的數據更新到應用;當RPDO的傳輸類型為0xFE或0xFF時,將接收到的數據直接更新。
● 當TPDO的傳輸類型為0時,如果映射數據發生改變,且接收到一個同步幀,則發送該TPDO;當TPDO的傳輸類型為0x01~0xF0時,接收到相應個數的同步幀時,發送該TPDO。當TPDO的傳輸類型是0xFE或0xFF時,映射數據發生改變或者事件計時器到達則發送該TPDO。
● 禁止時間:針對TPDO設置了禁止時間,存放在通信參數(1800h~1803h)的子索引03上,防止CAN網絡被優先級較低的PDO持續占有。該參數的單位是0.1ms,設置數值后,同一個TPDO傳輸間隔減不得小于該參數對應的時間。
● 事件計時器(時間):針對異步傳輸(傳輸類型為0xFE或0xFF)的TPDO,定義事件計時器,位于通信參數(1800h~1803h)的子索引05上。TPDO會按固定時間間隔上報數據,單位ms。如果在計時器運行周期內出現了數據改變等其它事件,TPDO也會觸發,且事件計數器會被立即復位。
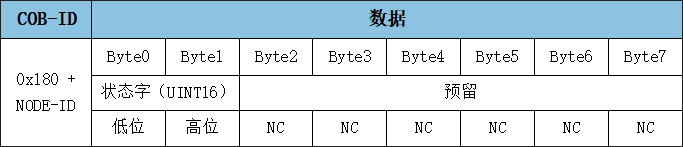
(1)TPDO出廠默認映射
TPDO1:
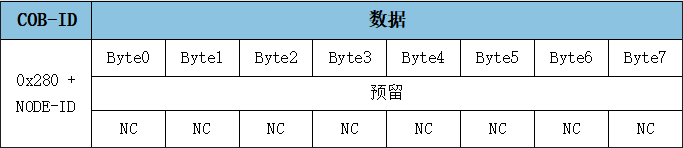
TPDO2:
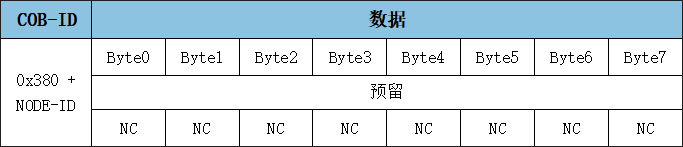
TPDO3:
TPDO4:
(2)RPDO出廠默認映射
RPDO1:
RPDO2:
RPDO3:
RPDO4:
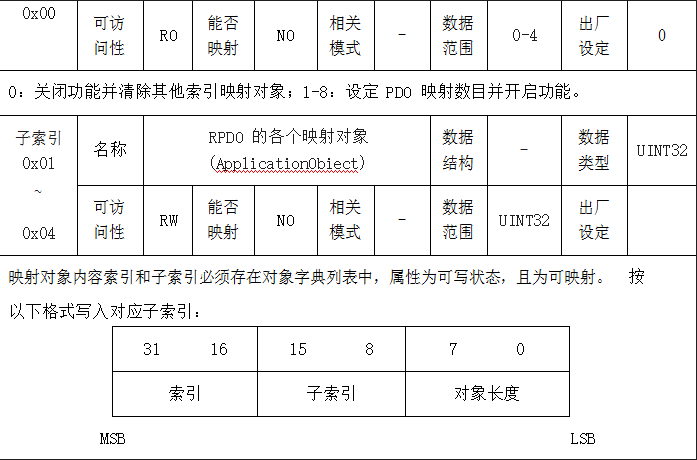
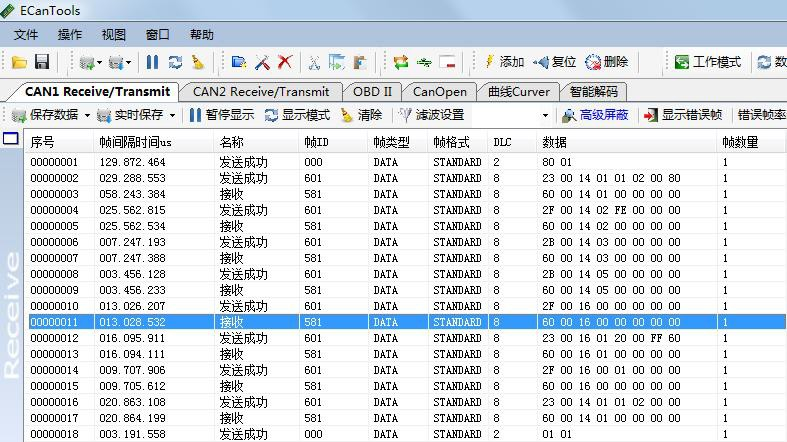
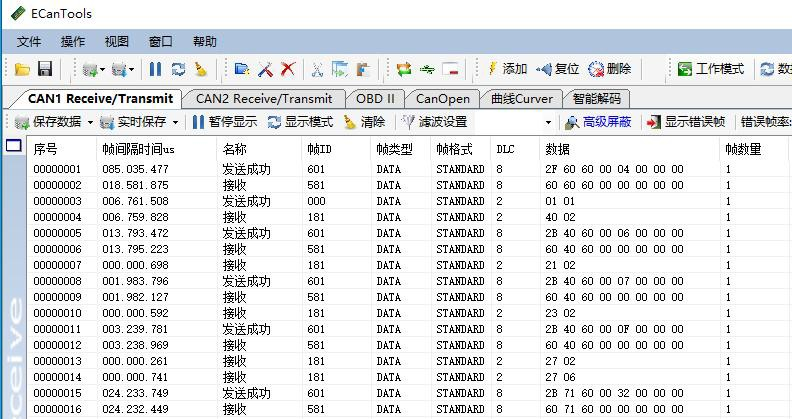
(3)RPDO映射舉例
例如,將RPDO1使能,并將映射修改成,僅發送目標速度,CANopen節點號為1。
報文1:節點進入預操作模式;
報文2:通訊參數設置索引0x1400,子索引0x01,值0x80000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入去使能狀態;
報文3:設置成功,正確應答;
報文4:通訊參數設置索引0x1400,子索引0x02,值0xFE發送類型為異步,制造商特定時間;
報文5:設置成功,正確應答;
報文6:通訊參數設置索引0x1400,子索引0x03,值0x00生產禁止約束時間為0;
報文7:設置成功,正確應答;
報文8:通訊參數設置索引0x1400,子索引0x05,值0x00時間定時器觸發時間為0;
報文9:設置成功,正確應答;
報文10:通訊參數設置索引0x1600,子索引0x00,值0x00有效條目數清零;
報文11:設置成功,正確應答;
報文12:通訊參數設置索引0x1600,子索引0x01,值0x60FF0020為映射到索引0x60FF,子索引0x00,對象是32位,指令目標速度;
報文13:設置成功,正確應答;
報文14:通訊參數設置索引0x1600,子索引0x00,值0x01有效條目數設置為1;
報文15:設置成功,正確應答;
報文16:通訊參數設置索引0x1400,子索引0x01,值0x00000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入使能狀態;
報文17:設置成功,正確應答;
報文18:節點進入操作模式。
(4)TPDO映射舉例
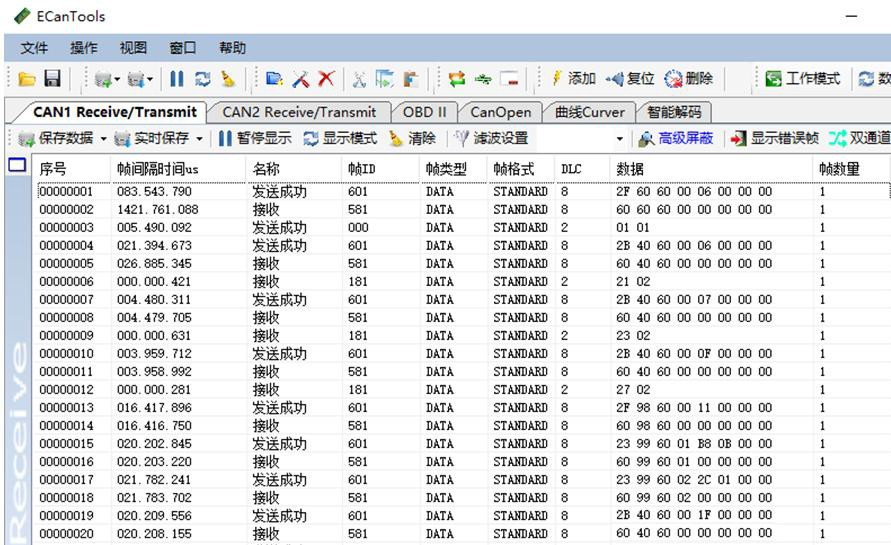
例如,將TPDO1使能,并將映射修改成當前速度、當前位置,100ms上報一次,CANopen節點號為1。
報文1:節點進入預操作模式;
報文2:通訊參數設置索引0x1800,子索引0x01,值0x80000000+0x180+Node-ID(TPDO1的ID,使TPDO1進入去使能狀態;
報文3:設置成功,正確應答;
報文4:通訊參數設置索引0x1800,子索引0x02,值0xFE發送類型為異步,制造商特定時間;
報文5:設置成功,正確應答;
報文6:通訊參數設置索引0x1800,子索引0x03,值0x00生產禁止約束時間為0;
報文7:設置成功,正確應答;
報文8:通訊參數設置索引0x1800,子索引0x05,值0x64時間定時器觸發時間為100ms;
報文9:設置成功,正確應答;
報文10:通訊參數設置索引0x1A00,子索引0x00,值0x00有效條目數清零;
報文11:設置成功,正確應答;
報文12:通訊參數設置索引0x1A00,子索引0x01,值0x606C0020為映射到索引0x606C,子索引0x00,對象是32位,指令當前速度;
報文13:設置成功,正確應答;
報文14:通訊參數設置索引0x1A00,子索引0x02,值0x60640020為映射到索引0x6064,子索引0x00,對象是32位,指令當前位置;
報文15:設置成功,正確應答;
報文16:通訊參數設置索引0x1A00,子索引0x00,值0x02有效條目數設置為2;
報文17:設置成功,正確應答;
報文18:通訊參數設置索引0x1800,子索引0x01,值0x00000000+0x180+Node-ID(TPDO1的ID,使TPDO1進入使能狀態;
報文19:設置成功,正確應答;
報文20:節點進入操作模式。
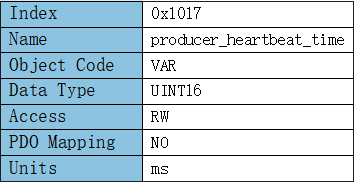
6、Heartbeat報文
CANopen主站可配置從站對象字典0x1017中的數據,使其發送生產者心跳,并且主站會按照填寫的時間進行檢查,若超過一定時間沒有收到從站的心跳報文,則認為從站已經離線或損壞。
Heartbeat:
相關參數:
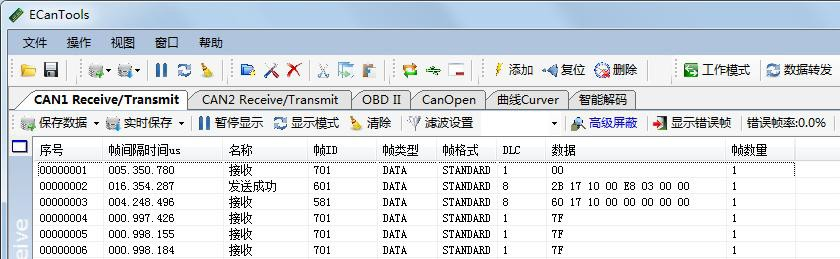
(1)配置伺服發送心跳
報文1:GCAN伺服電機初始化完成
報文2:向索引0x1017寫入SDO,配置心跳產生時間(單位ms),E8 03為心跳時間1000ms。
報文3:GCAN伺服電機回復SDO寫入成功。報文4-6:GCAN伺服電機每秒發送心跳報文。
(2)配置主站發送心跳
CANopen主站可配置從站對象字典的0x1016中的數據,可使其檢測消費者心跳,此時需要主站按照配置的時間發送心跳報文,若從站超過一定時間沒有接收到主站的心跳,則會主動進入預操作狀態并發送心跳錯誤Emergency報文。
7、SYNC報文
同步對象用于控制數據在網絡設備間的同步傳輸,例如同步啟動多個軸。同步報文的傳輸是基于生產者—消費者模型的,所有支持同步PDO的節點都可以作為消費者(同時)接收到此報文,并使用該對象與其他節點進行同步。
一般應用方式為SYNC主節點定時發送SYNC對象,SYNC從節點收到后同步執行任務。
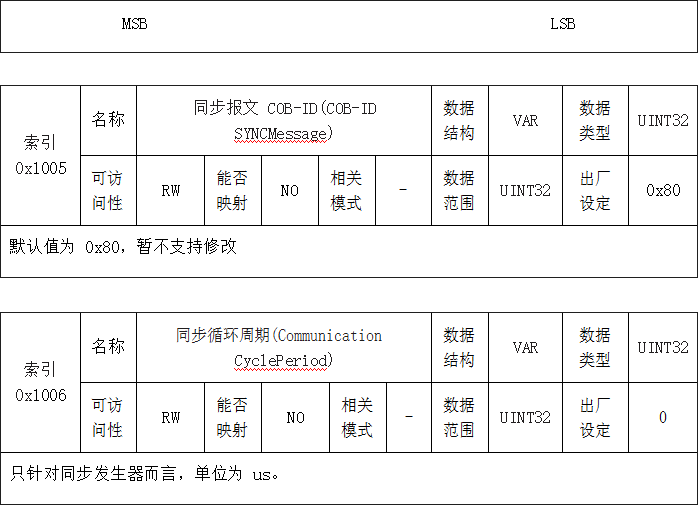
CANopen建議用一個最高優先級的COB-ID以保證同步信號正常傳送。SYNC報文可以不傳送數據以使報文盡可能短。
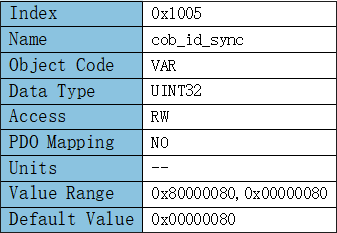
SYNC報文的COB-ID固定為0x080,COB-ID可以從對象字典的0x1005讀出。相關參數:
(1)位置模式,同步舉例
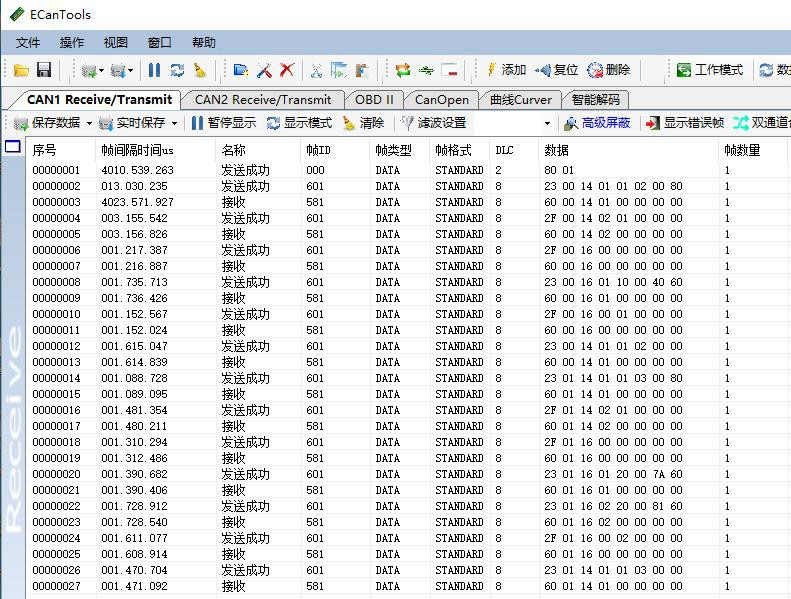
將節點1和節點2的RPDO1映射為控制字0x6040,RPDO2映射為目標位置0x607A和速度命令0x6081,接收到1條同步幀時,發送PDO。運行模式默認為位置模式。操作舉例如下:
將RPDO1使能,并將映射修改成,僅發送0x6040控制字,CANopen節點號為1:
報文1:節點1進入預操作模式;
報文2:通訊參數設置索引0x1400,子索引0x01,值0x80000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入去使能狀態;
報文3:通訊參數設置索引0x1400,子索引0x02,值0x01發送類型為同步,收到一個同步幀,更新數據;
報文4:通訊參數設置索引0x1600,子索引0x00,值0x00有效條目數清零;
報文5:通訊參數設置索引0x1600,子索引0x01,值0x60400010為映射到索引0x6040,子索引0x00,對象是16位,指令控制字;
報文6:通訊參數設置索引0x1600,子索引0x00,值0x01有效條目數設置為1;
報文7:通訊參數設置索引0x1400,子索引0x01,值0x00000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入使能狀態;
將RPDO2使能,并將映射修改成,發送0x607A目標位置和0x6081目標速度,CANopen節點號為1:
報文1:通訊參數設置索引0x1401,子索引0x01,值0x80000000+0x300+Node-ID(RPDO1的ID,使RPDO1進入去使能狀態;
報文2:通訊參數設置索引0x1401,子索引0x02,值0x01,發送類型為同步,收到一個同步幀,更新數據;
報文3:通訊參數設置索引0x1601,子索引0x00,值0x00有效條目數清零;
報文4:通訊參數設置索引0x1601,子索引0x01,值0x607A0020為映射到索引0x607A,子索引0x00,對象是32位,指令目標位置;
報文5:通訊參數設置索引0x1601,子索引0x02,值0x60810020為映射到索引0x6081,子索引0x00,對象是32位,指令目標速度;
報文6:通訊參數設置索引0x1601,子索引0x00,值0x02有效條目數設置為2;
報文7:通訊參數設置索引0x1401,子索引0x01,值0x00000000+0x300+Node-ID(RPDO1的ID,使RPDO2進入使能狀態);
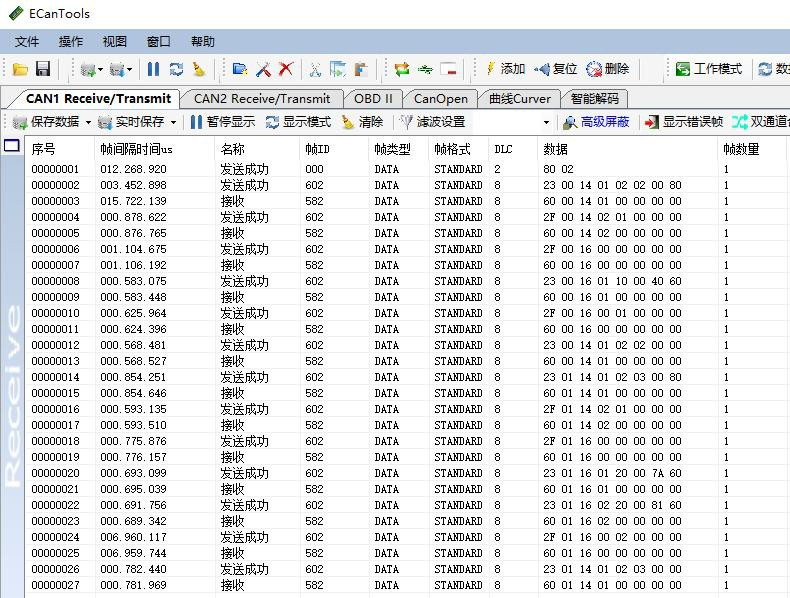
將RPDO1使能,并將映射修改成,僅發送0x6040控制字,CANopen節點號為2:
報文1:節點2進入預操作模式;
報文2:通訊參數設置索引0x1400,子索引0x01,值0x80000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入去使能狀態;
報文3:通訊參數設置索引0x1400,子索引0x02,值0x01發送類型為同步,收到一個同步幀,更新數據;
報文4:通訊參數設置索引0x1600,子索引0x00,值0x00有效條目數清零;
報文5:通訊參數設置索引0x1600,子索引0x01,值0x60400010為映射到索引0x6040,子索引0x00,對象是16位,指令控制字;
報文6:通訊參數設置索引0x1600,子索引0x00,值0x01有效條目數設置為1;
報文7:通訊參數設置索引0x1400,子索引0x01,值0x00000000+0x200+Node-ID(RPDO1的ID,使RPDO1進入使能狀態;
將RPDO2使能,并將映射修改成,發送0x607A目標位置和0x6081目標速度,CANopen節點號為2:
報文1:通訊參數設置索引0x1401,子索引0x01,值0x80000000+0x300+Node-ID(RPDO1的ID,使RPDO1進入去使能狀態;
報文2:通訊參數設置索引0x1401,子索引0x02,值0x01,發送類型為同步,收到一個同步幀,更新數據;
報文3:通訊參數設置索引0x1601,子索引0x00,值0x00有效條目數清零;
報文4:通訊參數設置索引0x1601,子索引0x01,值0x607A0020為映射到索引0x607A,子索引0x00,對象是32位,指令目標位置;
報文5:通訊參數設置索引0x1601,子索引0x02,值0x60810020為映射到索引0x6081,子索引0x00,對象是32位,指令目標速度;
報文6:通訊參數設置索引0x1601,子索引0x00,值0x02有效條目數設置為2;
報文7:通訊參數設置索引0x1401,子索引0x01,值0x00000000+0x300+Node-ID(RPDO1的ID,使RPDO2進入使能狀態);
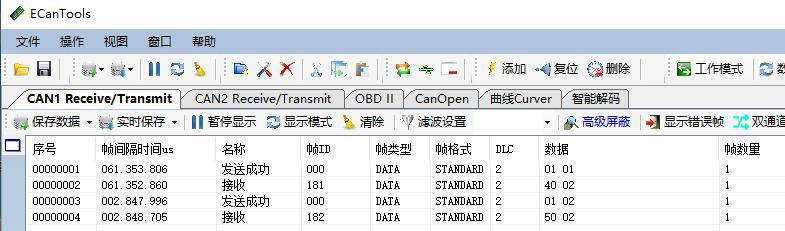
CANopen節點1、2進入啟動模式:
報文1:節點1進入啟動模式;
報文2:節點2進入啟動模式;
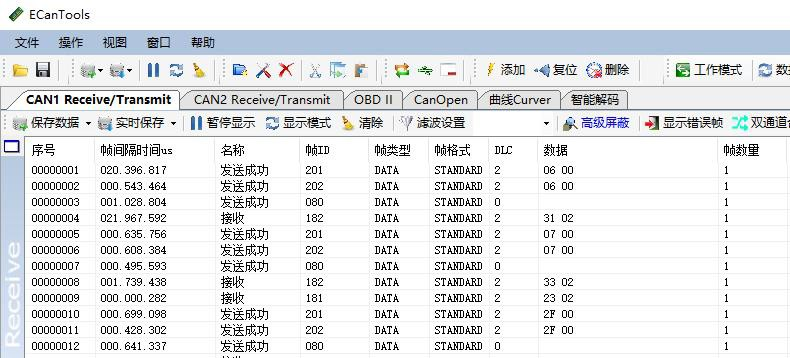
CANopen節點號1、節點號2發送06、07、2F電機使能,同步幀觸發。
報文1:RPDO1,COBID=0x201,值0x0006設置節點號1電機狀態ready toswitch on;
報文2:RPDO1,COBID=0x202,值0x0006設置節點號2電機狀態ready to switch on;
報文3:COBID=0x80,一條同步報文幀更新節點1、2伺服電機狀態切換到ready to switch on狀態;
報文4:RPDO1,COBID=0x201,值0x0007設置節點號1電機狀態switch on;
報文5:RPDO1,COBID=0x202,值0x0007設置節點號2電機狀態switch on;
報文6:COBID=0x80,一條同步報文幀更新節點1、2伺服電機狀態切換到switch on狀態。
報文7:RPDO1,COBID=0x201,值0x002F設置節點號1電機狀態Operation Enable;
報文8:RPDO1,COBID=0x202,值0x002F設置節點號2電機狀態Operation Enable;
報文9:COBID=0x80,一條同步報文幀更新節點1、2伺服電機狀態切換到Operation Enable狀態、電機使能。
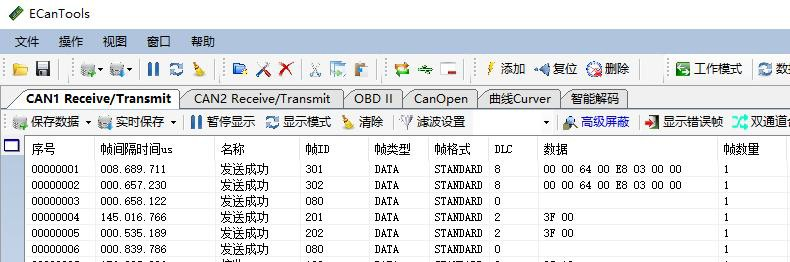
CANopen節點號1、節點號2發送目標位置、速度、電機使能,同步幀觸發。
報文1:RPDO2,COBID=0x301,值0x000003E8 00640000設置節點號1電機目標位置為640000即10進制6553600,速度03E8即10進制1000*0.1rpm;
報文2:RPDO1,COBID=0x302,值0x000003E8 00640000設置節點號2電機目標位置為640000即10進制6553600,速度03E8即10進制1000*0.1rpm;
報文3:COBID=0x80,一條同步報文幀更新節點1、2伺服電機目標位置及速度;
報文4:RPDO1,COBID=0x201,值0x003F設置節點號1電機運行;
報文5:RPDO1,COBID=0x202,值0x003F設置節點號2電機運行;
報文6:COBID=0x80,一條同步報文幀更新節點1、2伺服電機狀態切換到ready to switch on狀態;
報文7:ID:0x201數據:00 3F,設置節點號1伺服開始運行;
報文8:ID:0x202數據:00 3F,設置節點號2伺服開始運行;
報文9:COBID=0x80,一條同步報文幀更新節點1、2兩臺伺服電機開始以速度1000*0.1rpm,位置6553600同步運行。
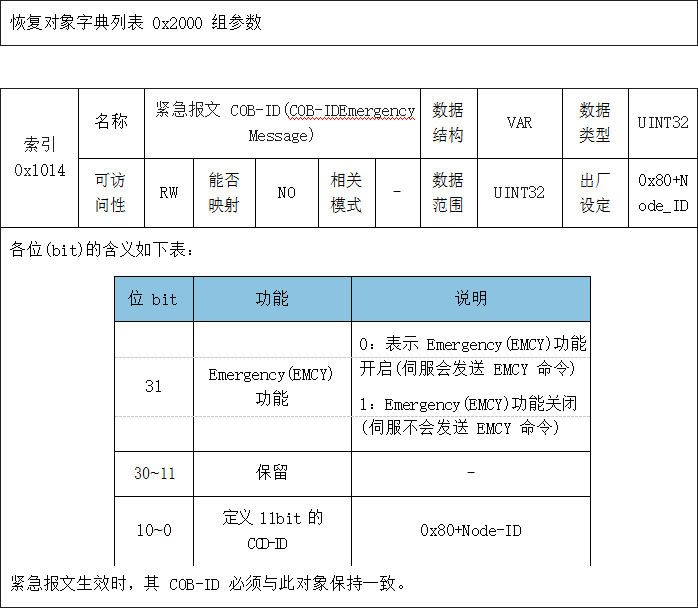
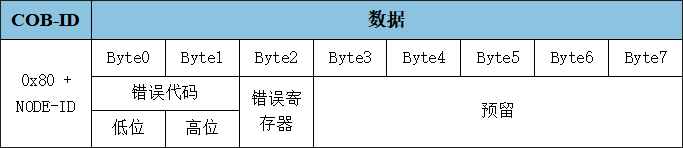
8、Emergency報文
驅動器發生報警時,CANopen會啟動一條Emergency報文,告知消費者當前驅動器類型以及錯誤代碼。在0x603F對象中的低字節可以讀到與面板顯示一致的報警代碼。
Emergency:
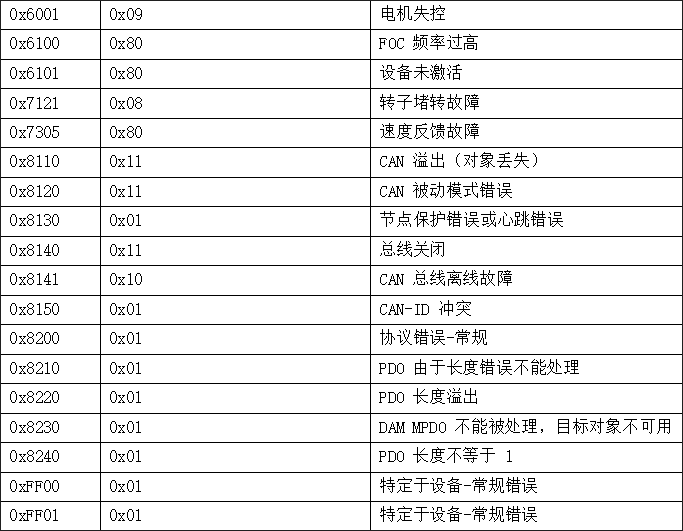
報警代碼表
相關參數
八、運動模式
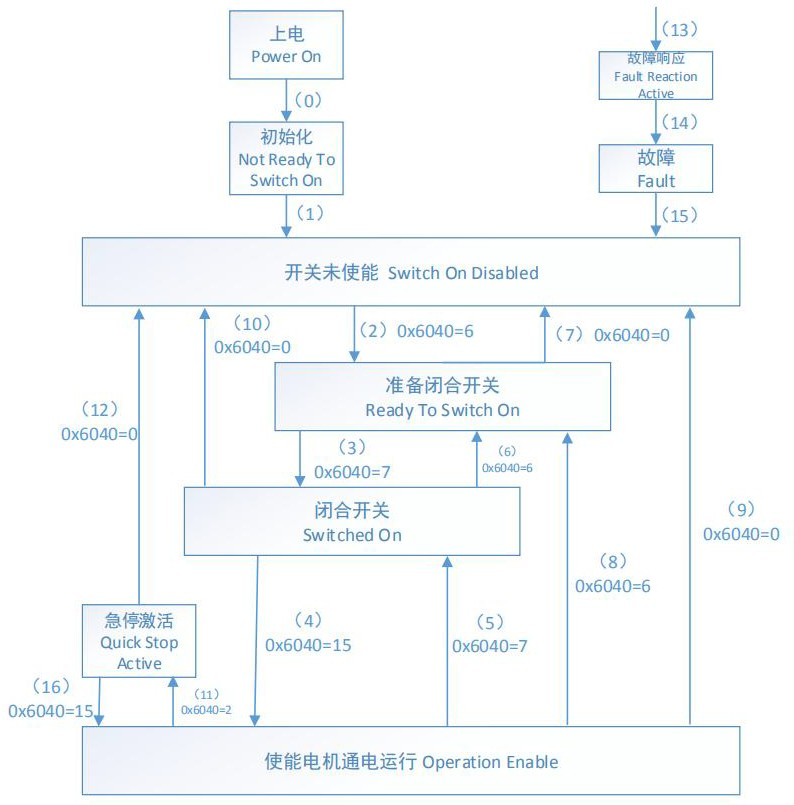
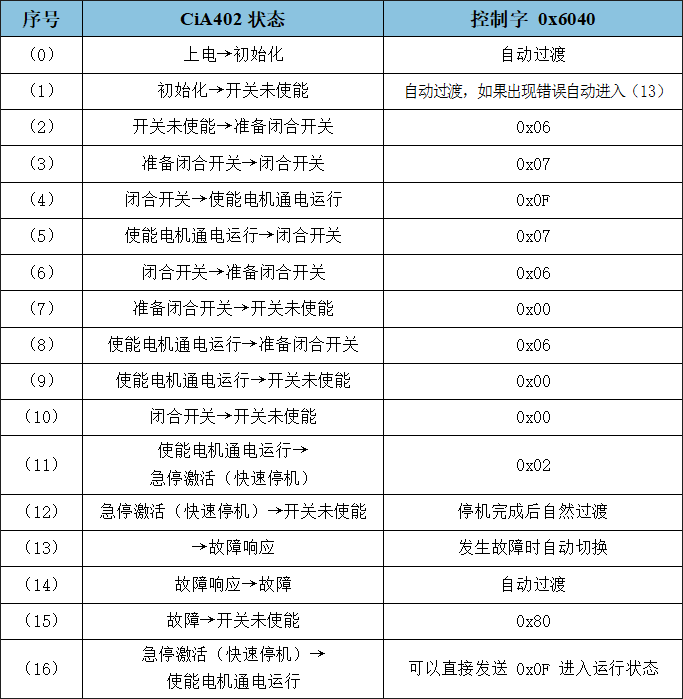
1、狀態機邏輯圖
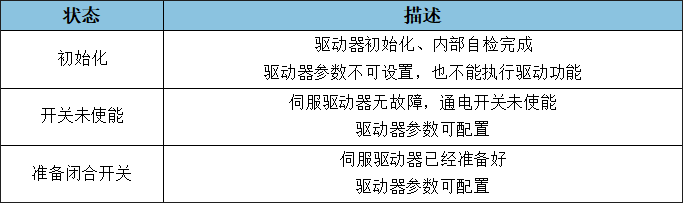
各狀態描述:
控制命令及狀態切換:
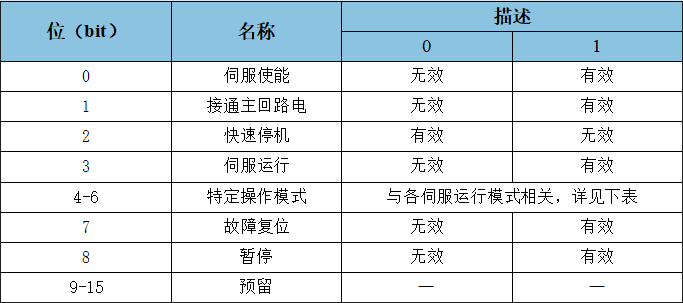
(1)控制字
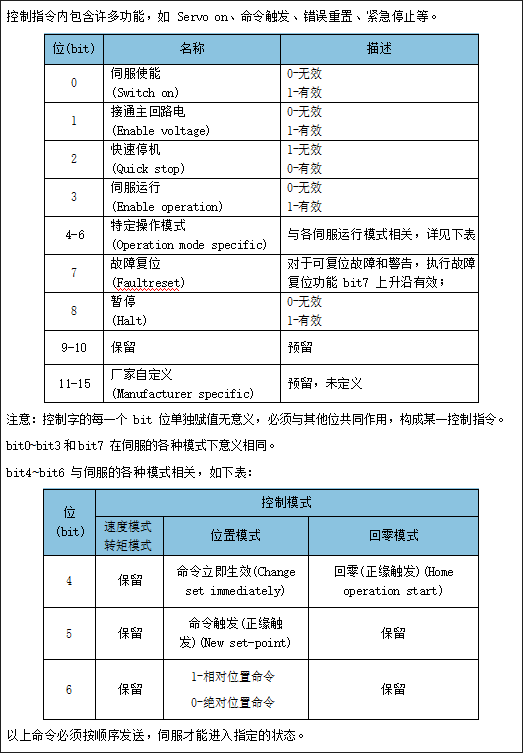
GCAN伺服電機的狀態通過控制字(索引0x6040)進行控制,控制字位定義表如下:
注意:控制字的每一個bit位單獨賦值無意義,必須與其他位共同作用,構成某一控制指令。
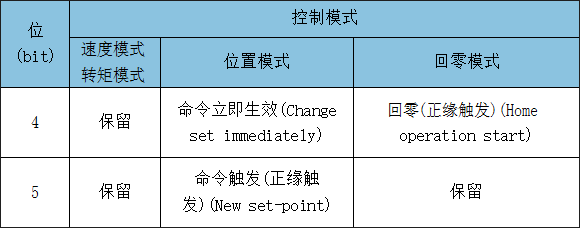
bit0~bit3和bit7在伺服的各種模式下意義相同。
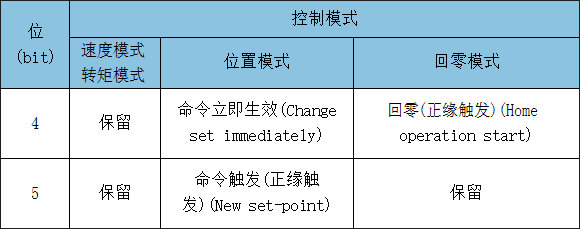
bit4~bit5與伺服的各種模式相關,如下表:
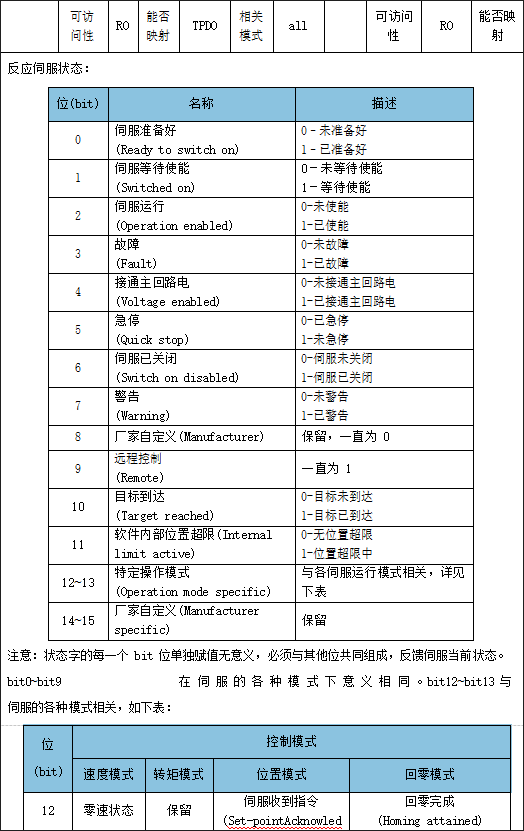
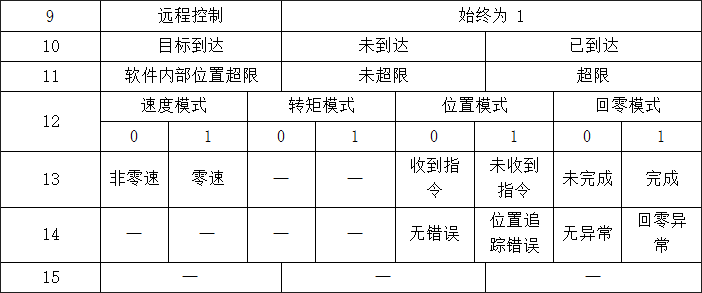
(2)狀態字
GCAN伺服電機的狀態通過狀態字(索引0x6041)來監測,狀態字位定義表如下:
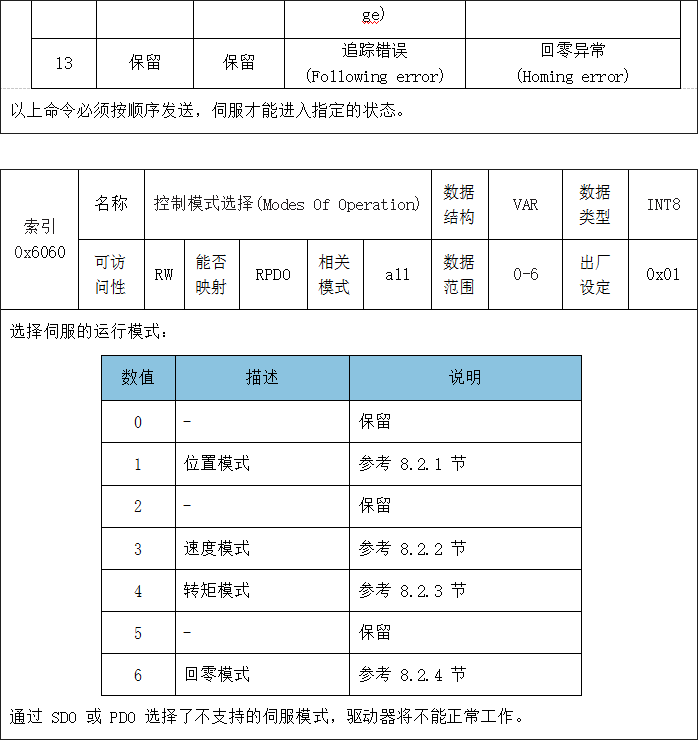
2、運行模式的選擇
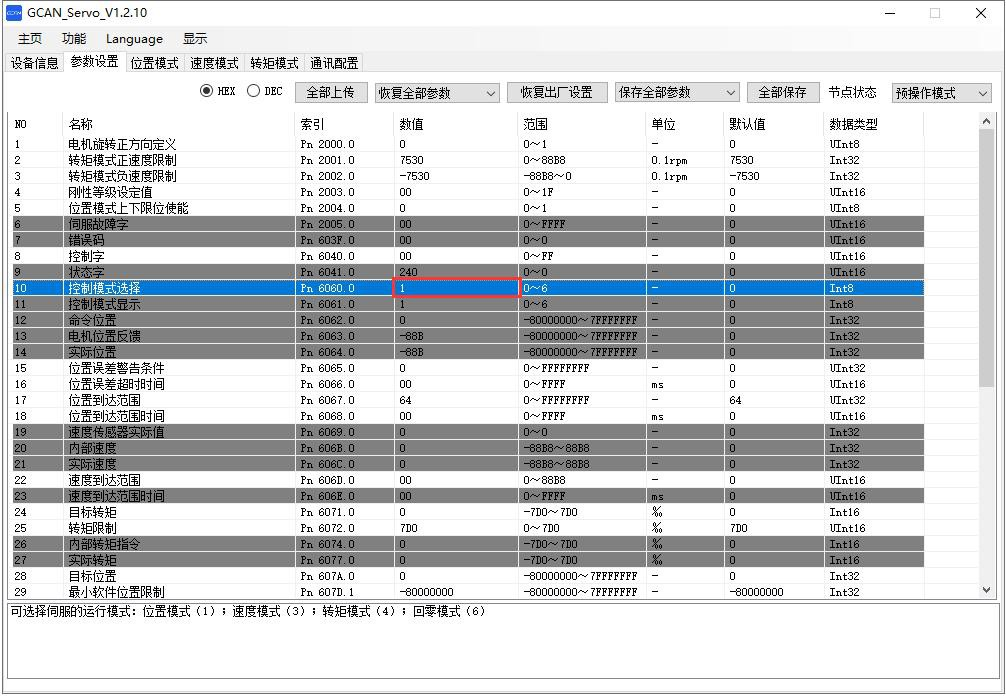
GCAN伺服電機的運行模式可通過對象字典0x6060設置
(1)位置模式
伺服驅動器接收到由上位機傳送的位置指令后,驅動器控制伺服電機到達目標位置。在位置控制模式下,上位機僅在一開始時告知驅動器目標位置、速度命令與加減速等相關設定。從命令觸發到到達目標位置這中間的運動規劃,都是由驅動器內部去執行。
1.位置模式控制框圖
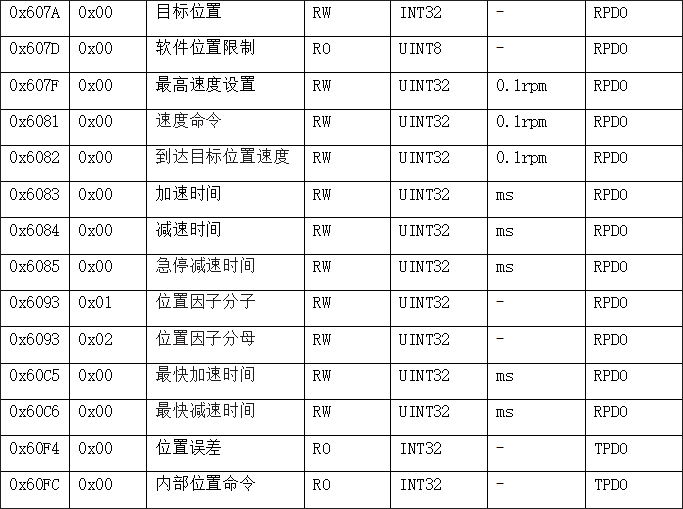
2.位置模式相關對象設置
3.位置模式控制方式
位置模式時,GCAN伺服電機的狀態通過控制字(索引0x6040)進行控制,控制字的每一個bit位單獨賦值無意義,必須與其他位共同作用,構成某一控制指令,如下表:
在位置模式下,位置指令生效有兩種模式:立即生效和觸發生效。
1、立即生效模式-適用于位置需頻繁改動:無論當前位置是否正在執行,控制器重新發送一個新的位置后。控制字6040h的Bit4設置為1,即發送數據1F,即伺服會立即停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
2、觸發生效模式-適用于位置無需頻繁改動:無論當前位置是否正在執行,控制器重新發送一個新的位置后。控制字6040h的bit5上升沿有效,即發送數據0F、3F后,伺服才會停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
4.位置模式操作舉例
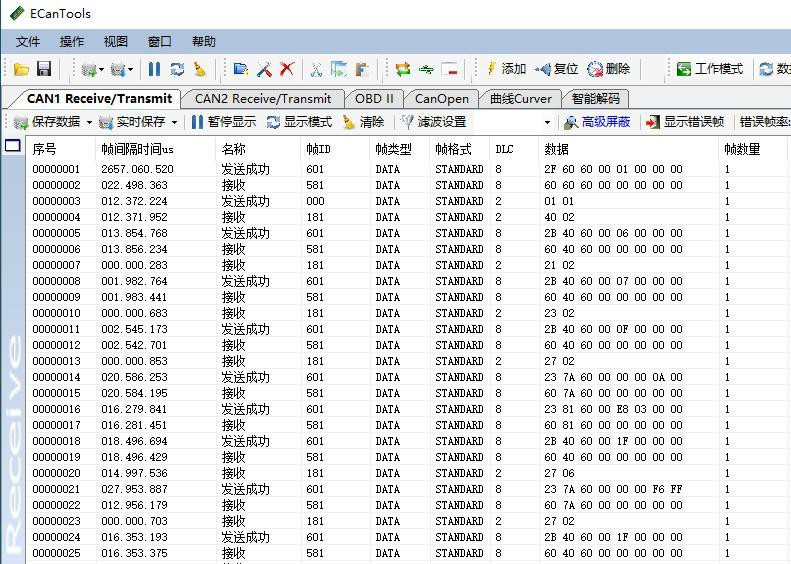
立即生效-位置模式操作舉例:(以節點號為1舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 01 00 00 00,設置0x6060為1,設置運行模式為位置模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置1號CANopen節點進入啟動狀態。
3、切換伺服狀態機至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態機切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態機切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態機切換到Operation Enable狀態,使電機使能。
4、設置目標位置
報文:ID:0x601數據:23 7A 60 00 00 00 0A 00,即65536*10個脈沖,電機相對0位置點正轉10圈。
5、設置最大速度
報文:ID:0x601數據:23 81 60 00 E8 03 00 00,單位0.1rpm,即轉速為1000*0.1rpm。
6、使能執行
報文:ID:0x601數據:2B 40 60 00 1F 00 00 00,使電機開始運動。更改電機運行位置,再次設置目標位置即可
7、設置目標位置
報文:ID:0x601數據:23 7A 60 00 00 00 F6 FF,即-65536*10個脈沖,電機相對0位置點反轉10圈。
8、使能執行
報文:ID:0x601數據:2B 40 60 00 1F 00 00 00,使電機開始運動。無論當前位置是否正在執行(還未完成),控制器重新發送一個新的位置后。給控制字發送數據1F,伺服會立即停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
觸發生效-位置模式操作舉例:(以節點號為1舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 01 00 00 00,設置0x6060為1,設置運行模式為位置模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置1號CANopen節點進入啟動狀態。
3、切換伺服狀態機至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態機切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態機切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態機切換到Operation Enable狀態,使電機使能。
4、設置目標位置
報文:ID:0x601數據:23 7A 60 00 00 00 0A 00,即65536*10個脈沖,電機相對0位置點正轉10圈。
5、設置最大速度
報文:ID:0x601數據:23 81 60 00 E8 03 00 00,單位0.1rpm,即轉速為1000*0.1rpm。
6、使能執行
報文:ID:0x601數據:2B 40 60 00 3F 00 00 00,使電機開始運動。
7、設置目標位置
報文:ID:0x601數據:23 7A 60 00 00 00 F6 FF,即-65536*10個脈沖,電機相對0位置點反轉10圈。
8、使能執行
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00;
報文:ID:0x601數據:2B 40 60 00 3F 00 00 00,使電機開始運動。
無論當前位置是否正在執行(還未完成),控制器重新發送一個新的位置后。給控制字發送數據0F、3F后,伺服才會停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
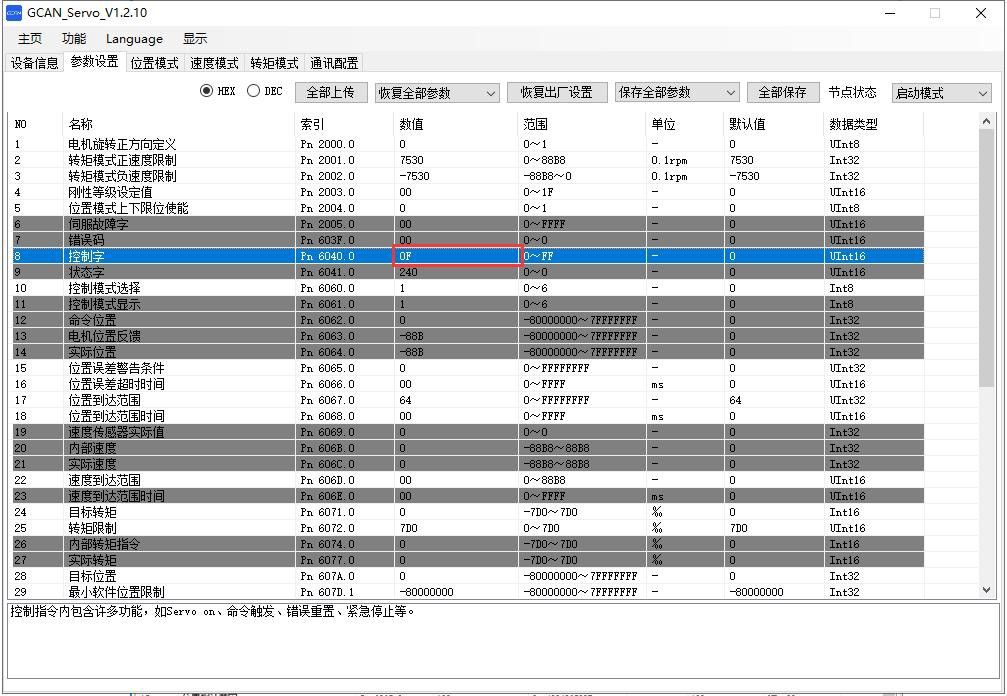
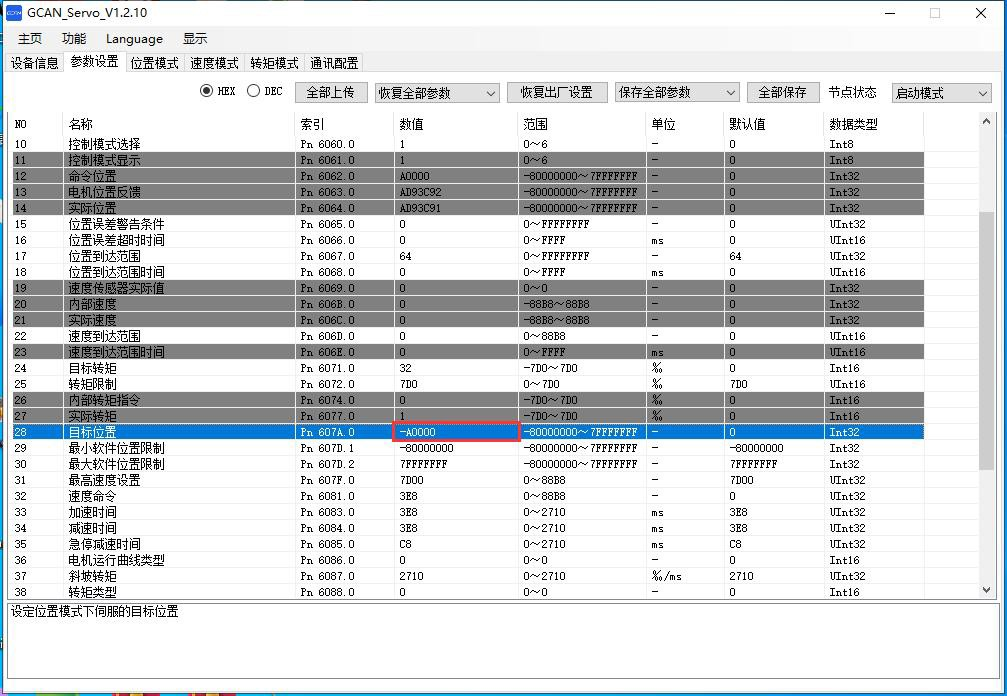
5.位置模式軟件操作舉例(16進制舉例)
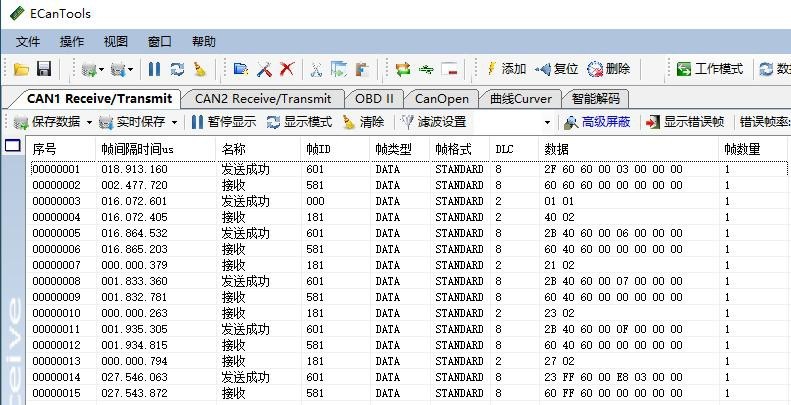
立即生效-位置模式操作舉例:
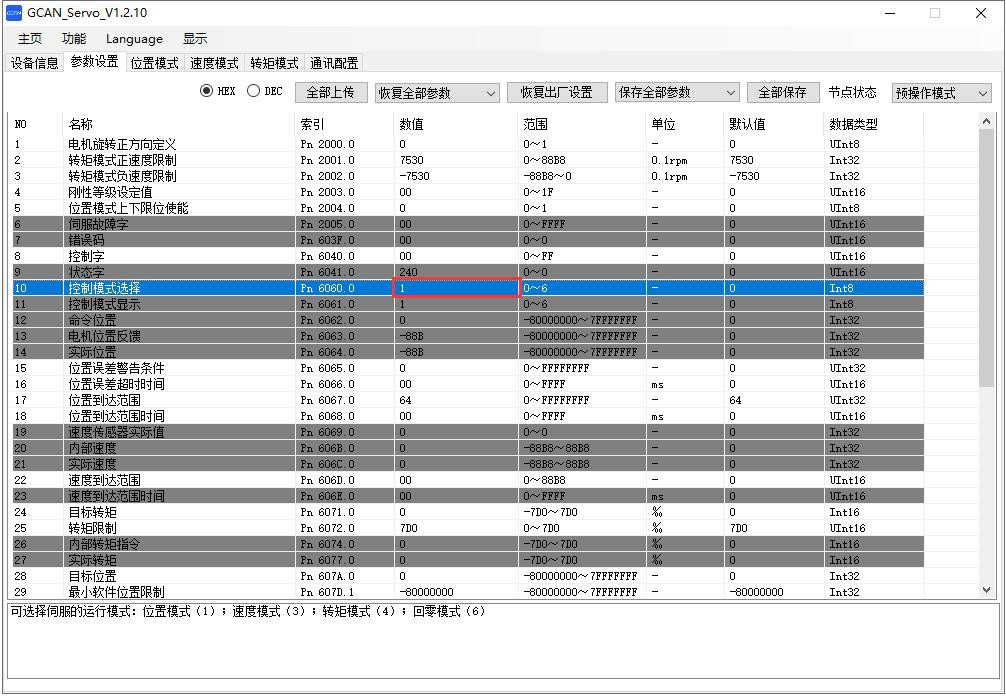
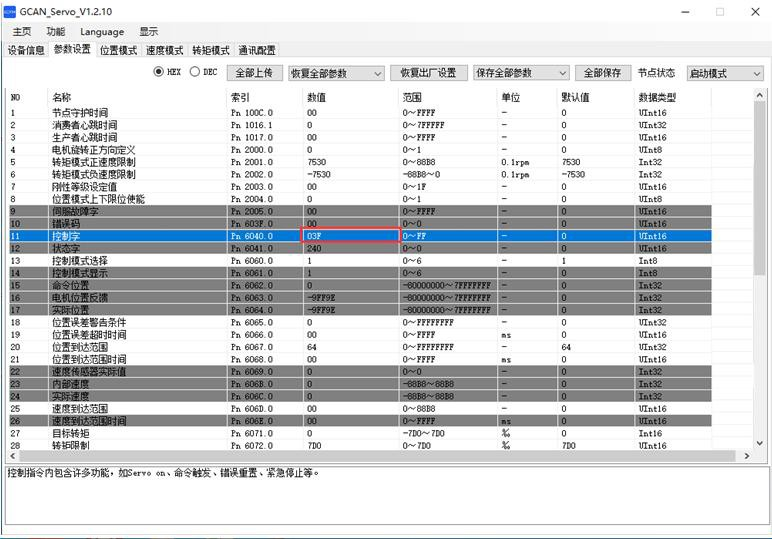
1、設置控制模式為位置模式:索引Pn 6060.0輸入01。
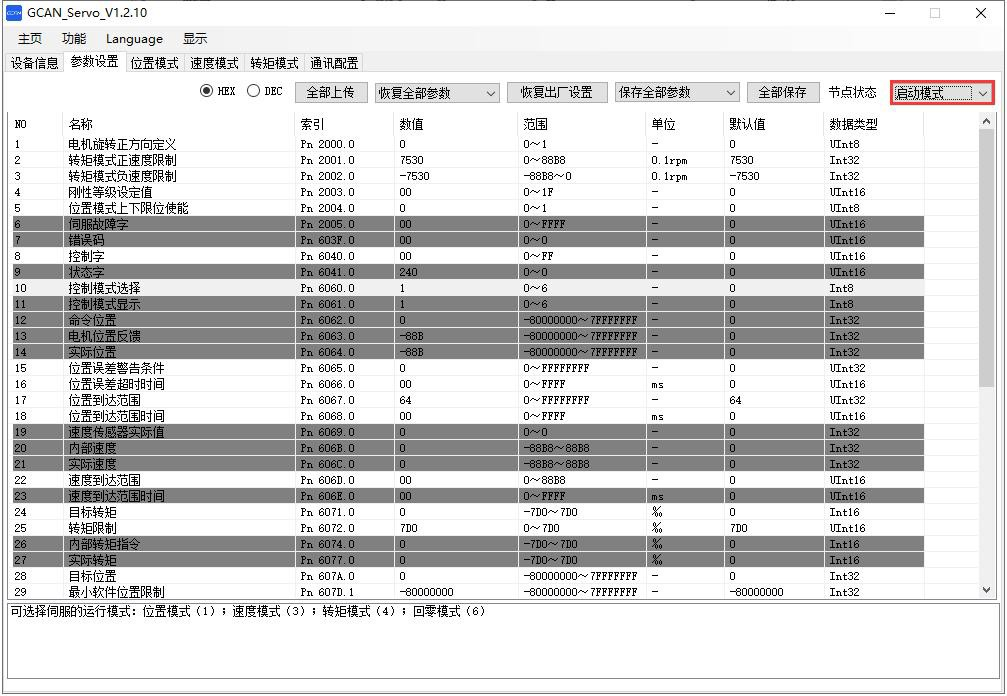
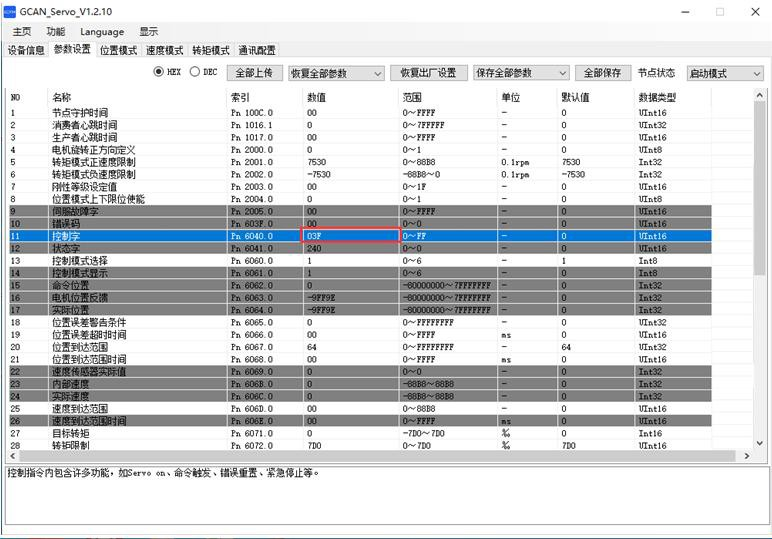
2、使CANopen進入啟動模式:當前頁面右上角節點狀態切換至“啟動模式”。3、切換伺服電機狀態至Operation Enable狀態:索引Pn 6040.0依次輸入06,07,0F。
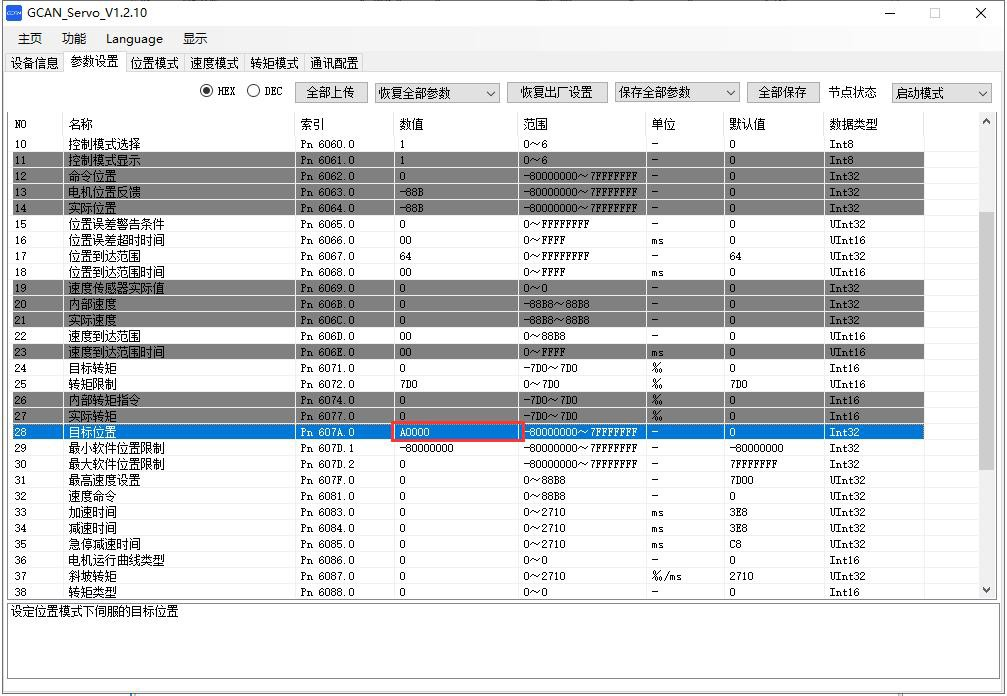
4、設置目標位置:索引Pn 607A.0輸入0A 00 00,即65536*10個脈沖,電機相對0位置點正轉10圈。
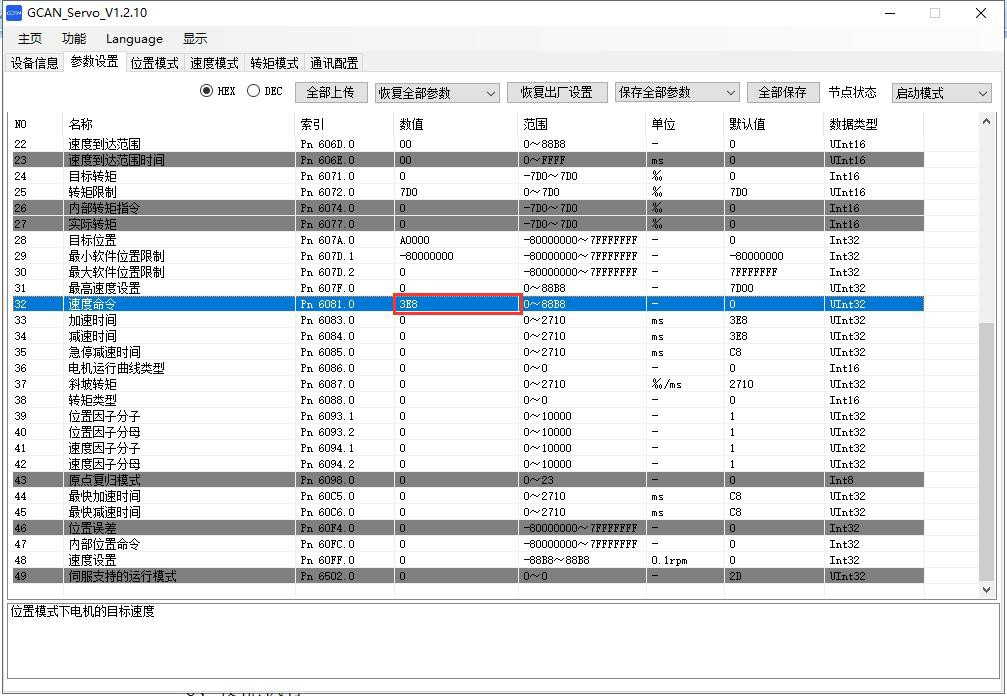
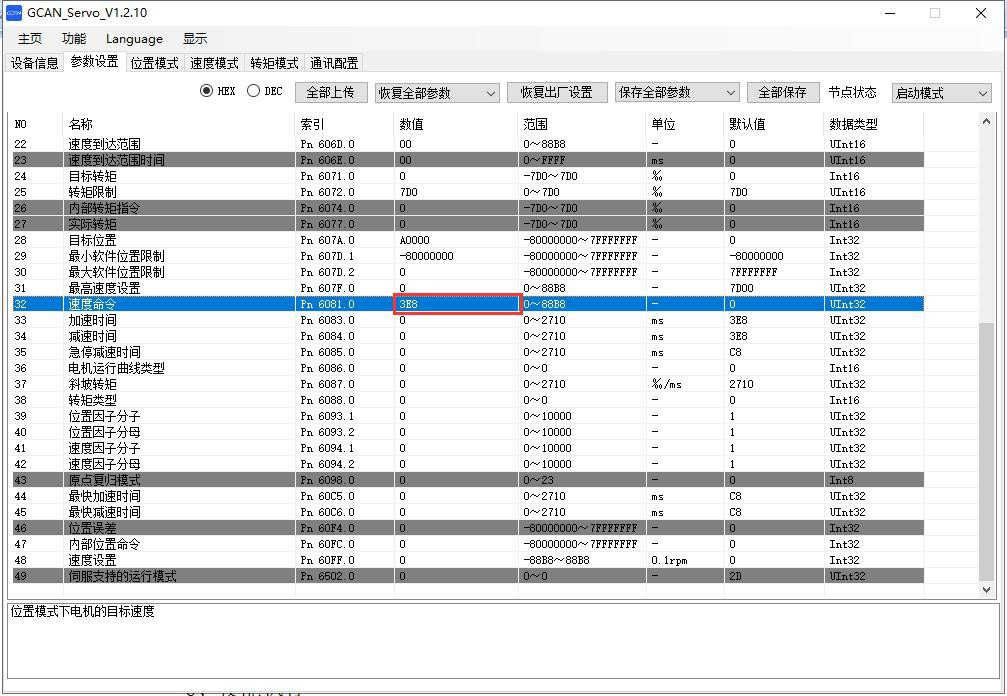
5、設置最大速度:索引Pn 6081.0輸入03 E8,單位0.1rpm,即轉速為10000*0.1rpm。
6、使能執行:索引Pn 6040.0輸入1F,使電機開始運動。
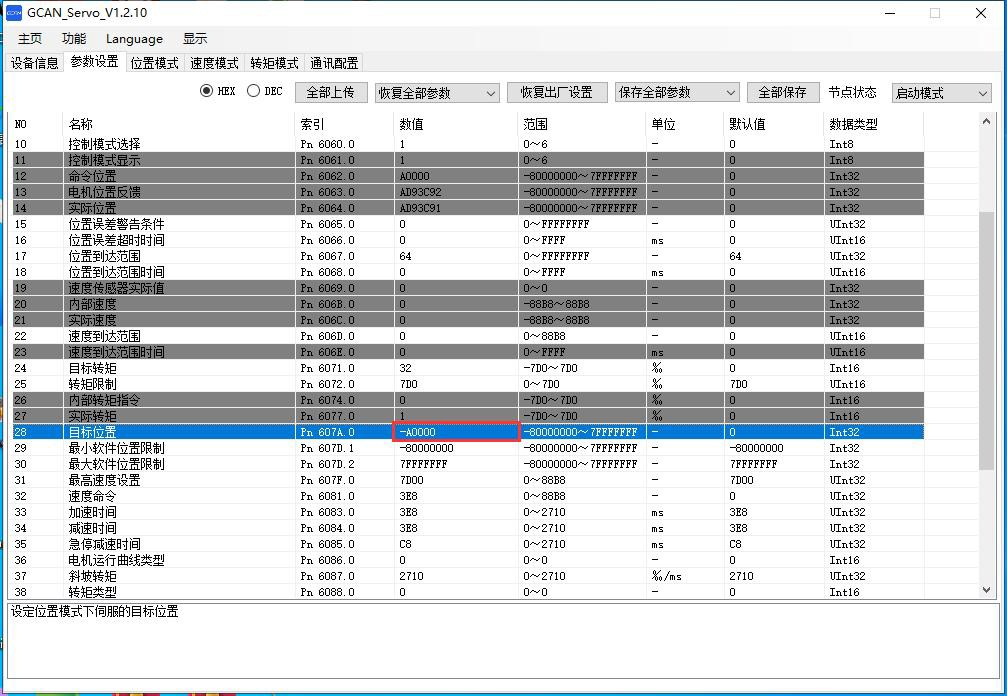
7、設置目標位置:索引Pn 607A.0輸入-0A 00 00,即-65536*10個脈沖,電機相對0位置點反轉10圈。
8、使能執行:索引Pn 6040.0輸入1F,使電機開始運動。
無論當前位置是否正在執行(還未完成),控制器重新發送一個新的位置后。給控制字發送數據1F,伺服會立即停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
觸發生效-位置模式操作舉例:
1、設置控制模式為位置模式:索引Pn 6060.0輸入01。
2、使CANopen進入啟動模式:當前頁面右上角節點狀態切換至“啟動模式”。
3、切換伺服電機狀態至Operation Enable狀態:索引Pn 6040.0依次輸入06,07,0F。
4、設置目標位置:索引Pn 607A.0輸入0A 00 00,即65536*10個脈沖,電機相對0位置點正轉10圈。
5、設置最大速度:索引Pn 6081.0輸入03 E8,單位0.1rpm,即轉速為10000*0.1rpm。
6、使能執行:索引Pn 6040.0輸入3F,使電機開始運動。
7、設置目標位置:索引Pn 607A.0輸入-0A 00 00,即-65536*10個脈沖,電機相對0位置點反轉10圈。
8、使能執行:索引Pn 6040.0依次輸入0F,3F,使電機開始運動。
無論當前位置是否正在執行(還未完成),控制器重新發送一個新的位置后。給控制字發送數據0F、3F后,伺服才會停止當前的位置命令,驅動器將根據最新的位置和速度信息立刻進行重新規劃執行。
(2)速度模式
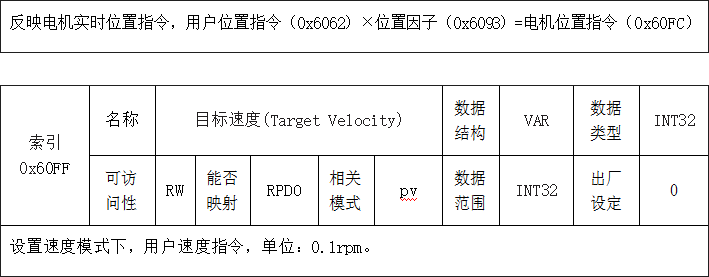
速度模式下,用戶給定速度、加速度、減速度后,伺服驅動器可按此設定規劃電機的速度曲線,并實現不同速度指令間的平滑切換。
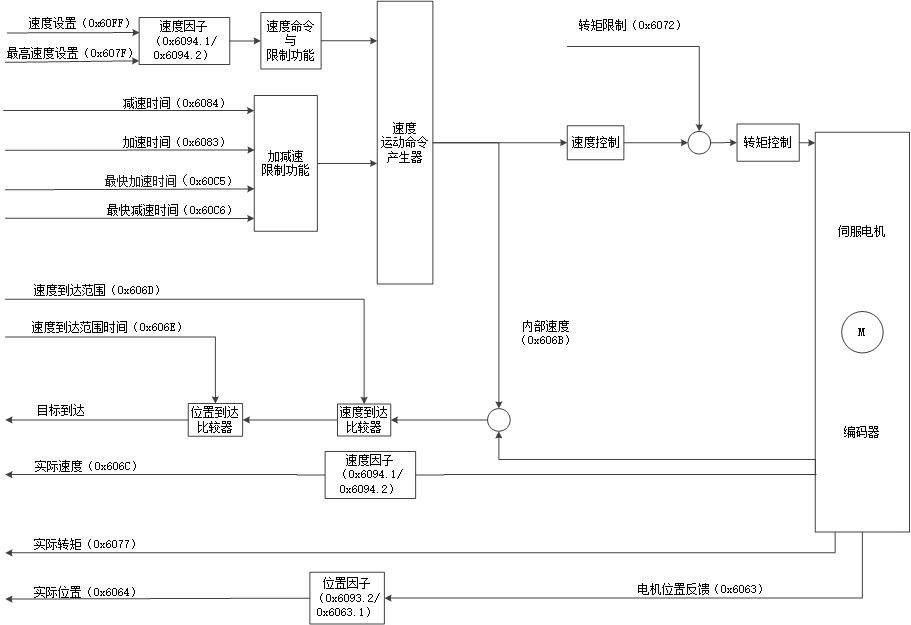
1.速度模式控制框圖
2.速度模式相關對象設置
3.速度模式操作舉例
速度模式操作舉例:(以節點號為1舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 03 00 00 00,設置0x6060為3,設置運行模式為速度模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置CANopen進入啟動狀態。
3、切換伺服狀態機至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態機切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態機切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態機切換到Operation Enable狀態,使電機使能。
4、設置目標速度
報文:ID:0x601數據:23 FF 60 00 E8 03 00 00,單位0.1rpm,即轉速為1000*0.1rpm。
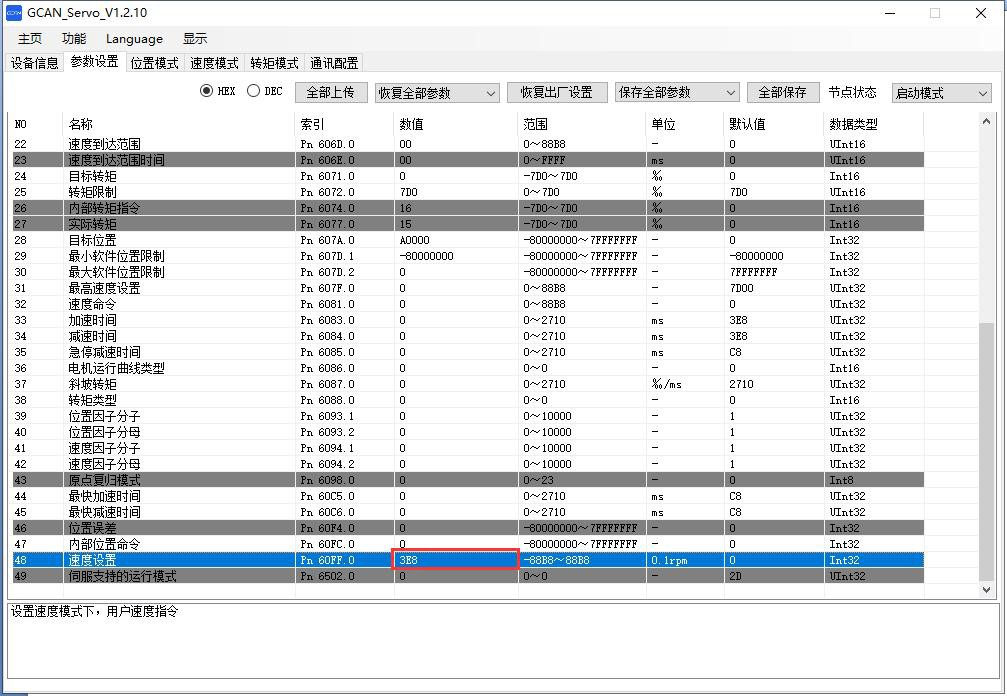
4.速度模式軟件操作舉例(16進制舉例)
1、設置控制模式為速度模式:索引Pn 6060.0輸入03。
2、使CANopen進入啟動模式:當前頁面右上角節點狀態切換至“啟動模式”。
3、切換伺服電機狀態至Operation Enable狀態:索引Pn 6040.0依次輸入06,07,0F。
4、設置目標速度:索引Pn 60FF.0輸入03 E8,單位0.1rpm,即轉速為1000*0.1rpm。
(3)轉矩模式
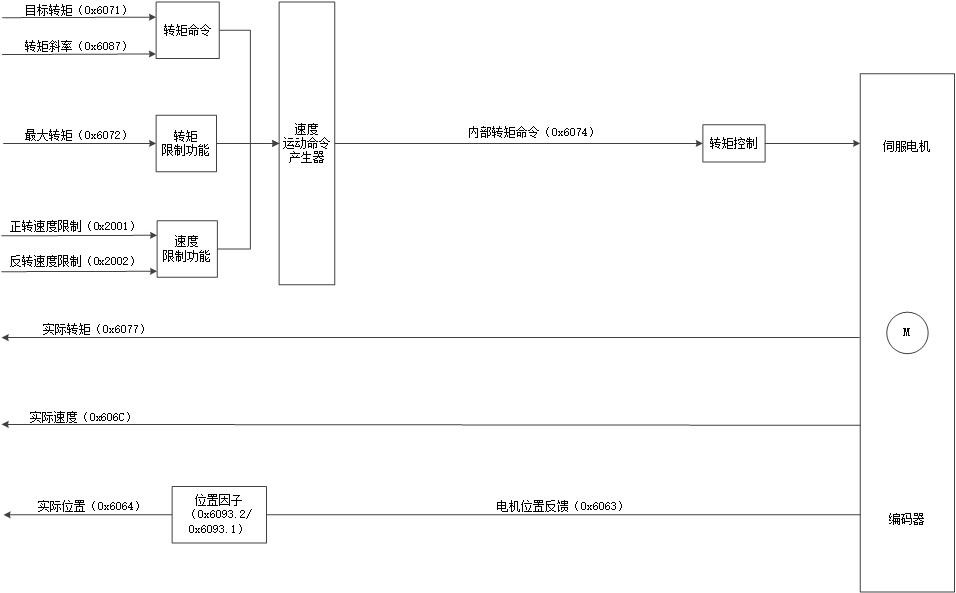
在轉矩模式下,上位機首先指定轉矩命令,然后驅動器的運動命令產生器根據這些條件規劃出轉矩斜率。
1.轉矩模式控制框圖
2.轉矩模式相關對象設置
3.轉矩模式操作舉例
轉矩模式操作舉例:(以節點號為1舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 04 00 00 00,設置0x6060為4,設置運行模式為轉矩模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置CANopen進入啟動狀態。
3、切換伺服狀態機至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態機切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態機切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態機切換到Operation Enable狀態,使電機使能。
4、設置目標轉矩
報文:ID:0x601數據:2B 71 60 00 32 00 00 00,單位‰Tn。即以5%的轉矩運行。
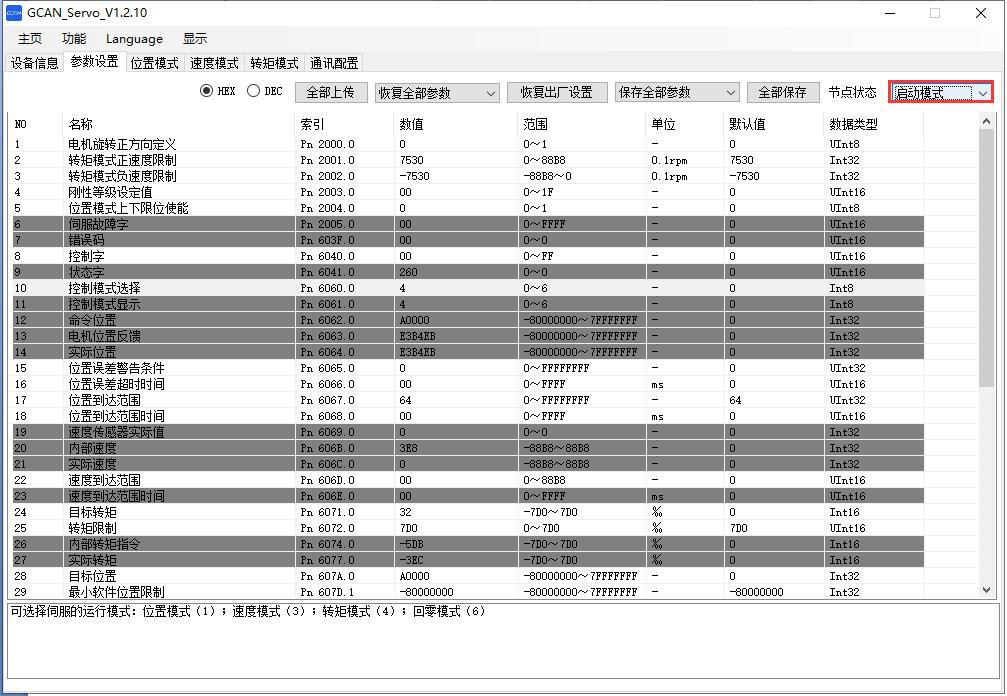
4.轉矩模式軟件操作舉例(16進制舉例)
1、設置控制模式為轉矩模式:索引Pn 6060.0輸入04。
2、使CANopen進入啟動模式:當前頁面右上角節點狀態切換至“啟動模式”。
3、切換伺服電機狀態至Operation Enable狀態:索引Pn 6040.0依次輸入06,07,0F。
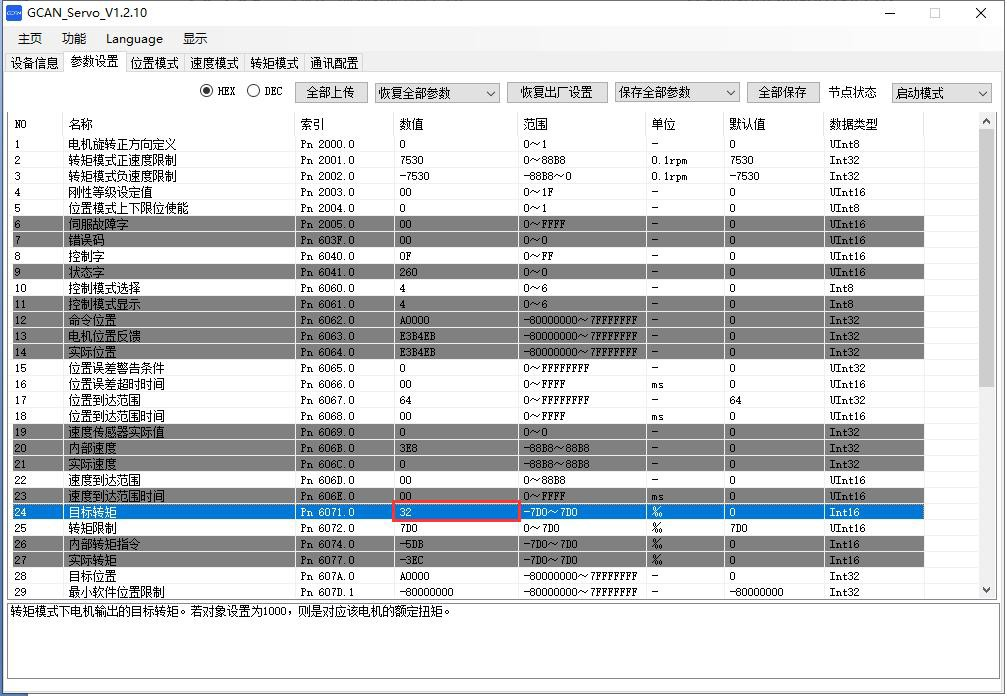
4、設置目標轉矩:索引Pn 6071.0輸入32,單位‰Tn。即以5%的轉矩運行。
(4)回零模式
GCAN-ISM伺服一體機提供多種回零模式,當編碼器為多圈絕對值編碼器(電池版本),此時索引0x2006為1,即檢測電池掉電,若電池沒電將報編碼器電池掉電故障,通常使用方法35回零;當編碼器為單圈絕對值編碼器(無電池版本),此時索引0x2006為0,即不檢測電池掉電,此時常用堵轉回零(回零方法-1和回零方法-2)、或者正負限位回零(回零方法17和回零方法18),用戶可以根據需求選擇不同的回零模式來實現找原點的操作。
如果需要檢測正、負限位信號,需將索引0x2004設為1,即使能正負限位信號檢測,否則正、負限位信號無效。
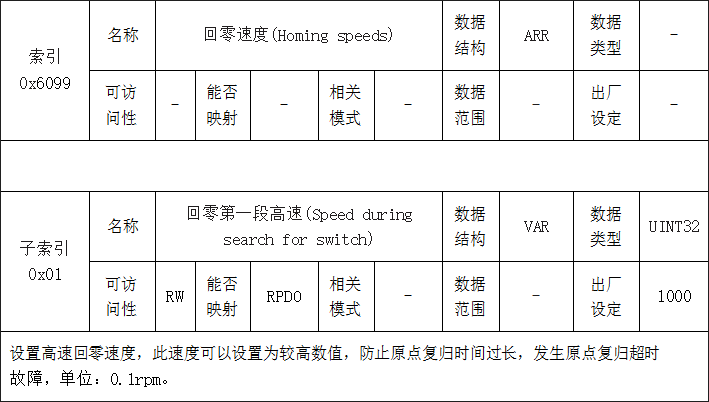
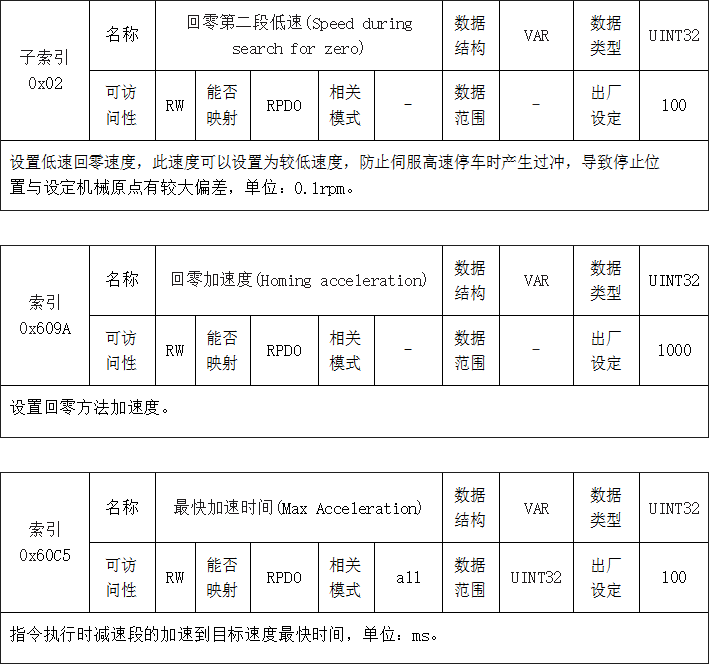
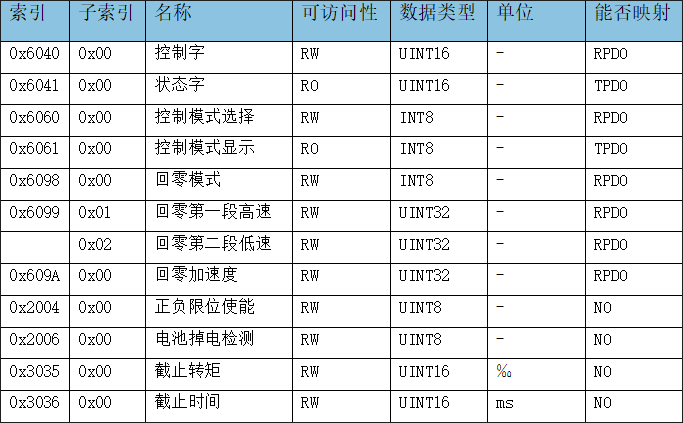
1.回零模式相關對象設置
2.回零模式操作舉例
回零模式操作舉例:(以節點號為1、方法-1舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 06 00 00 00,設置0x6060為6,
設置運行模式為回零模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置CANopen進入啟動狀態。
3、切換伺服狀態至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態切換到Operation Enable狀態,使電機使能。
4、設置回零方法
報文:ID:0x601數據:2F 98 60 00 FF 00 00 00,設置0x6098為FF,即為方法-1,檢測堵轉的變化。
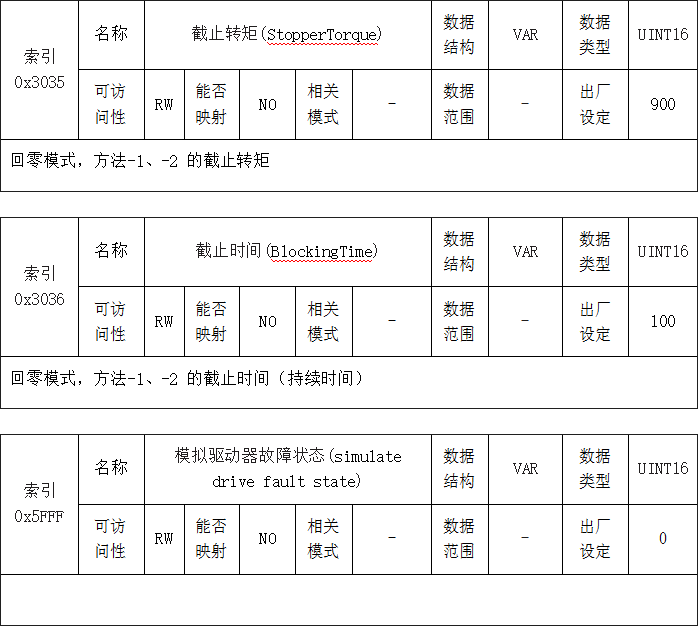
5、設置截至轉矩、截止時間、回零速度
報文:ID:0x601數據:2B 35 30 00 50 00 00 00,設置截至轉矩為80‰。
報文:ID:0x601數據:2B 36 30 00 E8 03 00 00,設置截止時間為1000ms。
報文:ID:0x601數據:23 99 60 01 B8 0B 00 00,設置回零第一段速度為3000*0.1rpm。
6、使能執行
報文:ID:0x601數據:2B 40 60 00 1F 00 00 00。驅動器首先以0x6099較快的速度向負方向移動,直到堵轉轉矩達到0x3035設定值且持續0x3036設定的時間后停止,然后將當前位置設為零點。
回零模式操作舉例:(以節點號為1、方法17舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 06 00 00 00,設置0x6060為6,設置運行模式為回零模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置CANopen進入啟動狀態。
3、切換伺服狀態機至Operation Enable狀態
報文:ID:0x601數據:2B 40 60 00 06 00 00 00,設置伺服狀態機切換到ready to switch on狀態。
報文:ID:0x601數據:2B 40 60 00 07 00 00 00,設置伺服狀態機切換到switched on狀態。
報文:ID:0x601數據:2B 40 60 00 0F 00 00 00,設置伺服狀態機切換到Operation Enable狀態,使電機使能。
4、設置回零方法
報文:ID:0x601數據:2F 98 60 00 11 00 00 00,設置0x6098為11,即為方法17,檢測負限位的變化。
5、設置回零第一段高速、第二段低速
報文:ID:0x601數據:23 99 60 01 B8 0B 00 00,設置伺服回零第一段高速為3000*0.1rpm。
報文:ID:0x601數據:23 99 60 02 2C 01 00 00,設置伺服回零第二段低速為300*0.1rpm。
6、使能執行
報文:ID:0x601數據:2B 40 60 00 1F 00 00 00。
回零模式操作舉例:(以節點號為1、方法35舉例)
1、設置控制模式
報文:ID:0x601數據:2F 60 60 00 06 00 00 00,設置0x6060為6,設置運行模式為回零模式。
2、使CANopen進入啟動模式
報文:ID:0x000數據:01 01,設置CANopen進入啟動狀態。
3、設置回零
報文:ID:0x601數據:2F 98 60 00 23 00 00 00,設置0x6098為23,即為方法35,將當前位置設置為位置0點。
4、使能執行
報文:ID:0x601數據:2B 40 60 00 10 00 00 00。
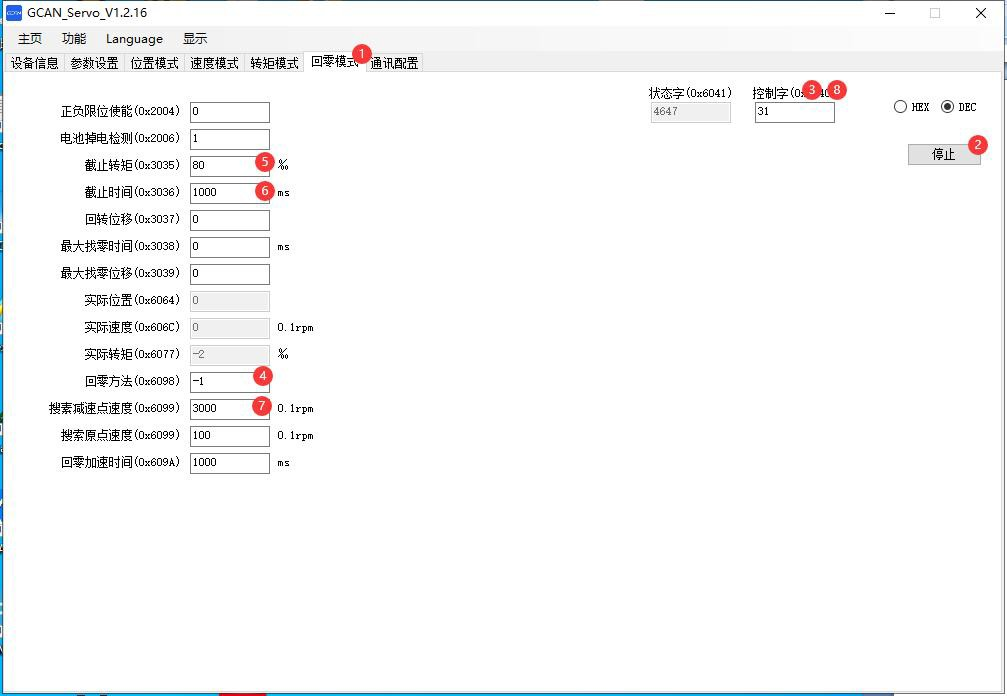
3.回零模式軟件操作舉例(10進制舉例)
方法-1操作舉例:
1、選擇回零模式標簽頁。
2、使CANopen進入啟動模式:點擊當前頁面右上角“啟動”按鈕。
3、切換伺服電機狀態至Operation Enable狀態:索引0x6040依次輸入06,07,15。
4、設置回零方法-1:索引0x6098輸入-1。
5、設置回零參數:
索引0x3035輸入80,單位0.01,即截止轉矩為80‰。
索引0x3036輸入1000,單位ms,即截止時間為1000ms。
索引0x6099.1輸入3000,單位0.1rpm,即第一段高速轉速為3000*0.1rpm。
6、使能執行:點擊當前頁面右上角“回零”按鈕,使電機開始運動。驅動器首先以0x6099較快的速度向負方向移動,直到堵轉轉矩達到0x3035設定值且持續0x3036設定的時間后停止,然后將當前位置設為零點。
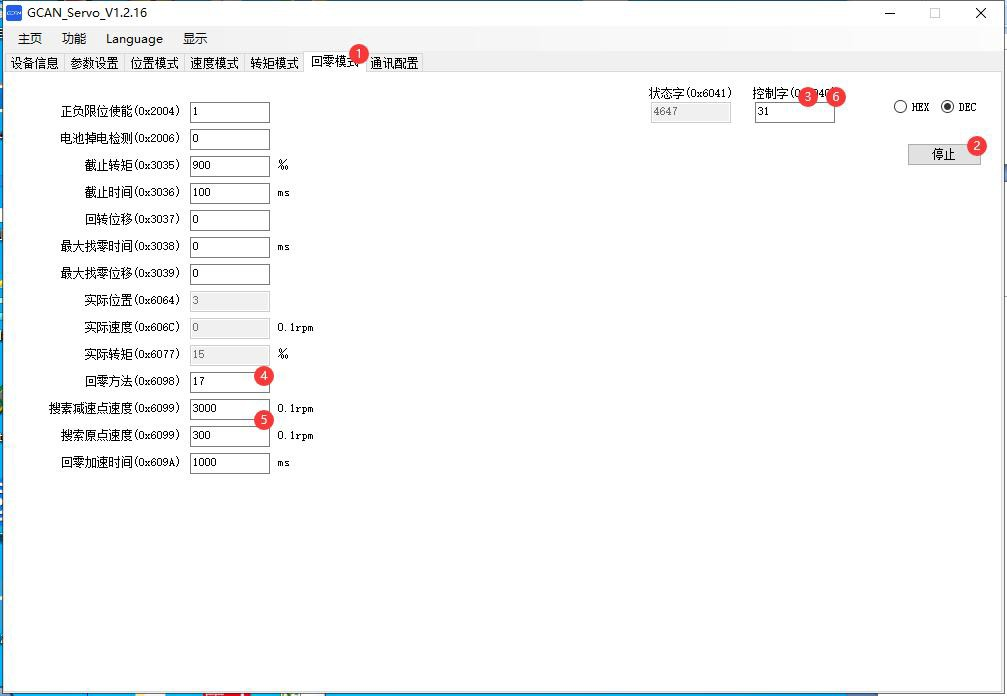
方法17操作舉例:
1、選擇回零模式標簽頁。
2、使CANopen進入啟動模式:點擊當前頁面右上角“啟動”按鈕。
3、切換伺服電機狀態至Operation Enable狀態:索引0x6040依次輸入06,07,15。
4、設置回零方法17:索引0x6098輸入17。
5、設置回零參數:
索引0x6099.1輸入3000,單位0.1rpm,即第一段高速轉速為3000*0.1rpm。
索引0x6099.2輸入300,單位0.1rpm,即第二段低速轉速為300*0.1rpm。
6、使能執行:索引0x6040輸入31,使電機開始運動。
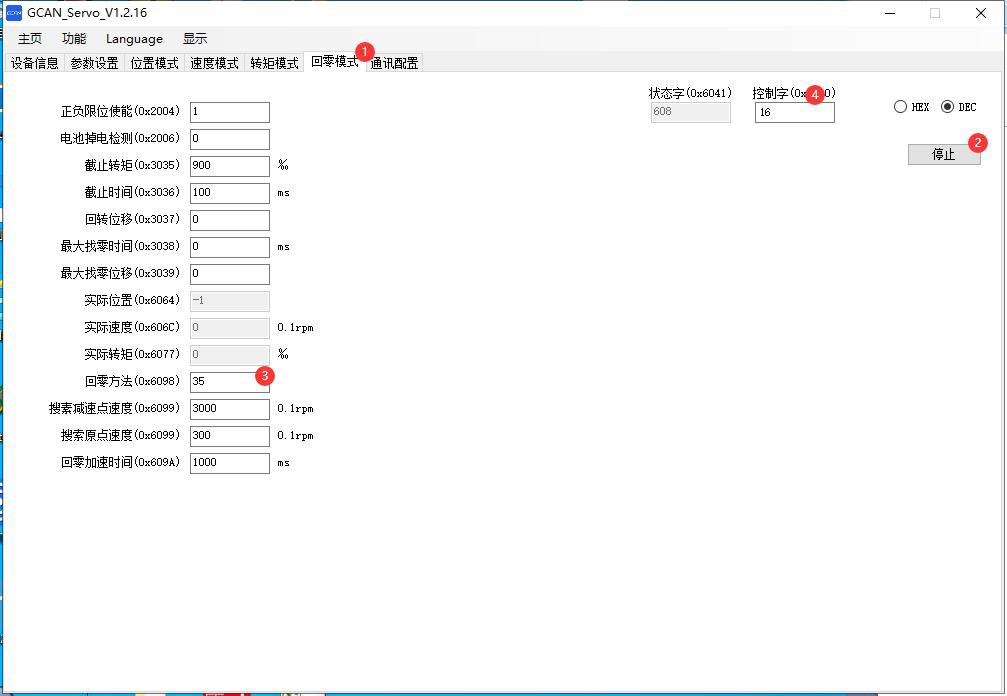
方法35操作舉例:
1、選擇回零模式標簽頁。
2、使CANopen進入啟動模式:點擊當前頁面右上角“啟動”按鈕。
3、設置回零方法35:索引0x6098輸入35。
4、使能執行:索引0x6040輸入16,當前位置設為零點。
4.回零模式方法詳解
方法-1:檢測堵轉的變化
A:回零啟動時,驅動器首先較快的向負方向移動,直到堵轉轉矩達到0x3035設定值且持續0x3036設定的時間后停止,然后將當前位置設為零點。
方法-2:檢測堵轉的變化
A:回零啟動時,驅動器首先較快的向正方向移動,直到堵轉轉矩達到0x3035設定值且持續0x3036設定的時間后停止,然后將當前位置設為零點。
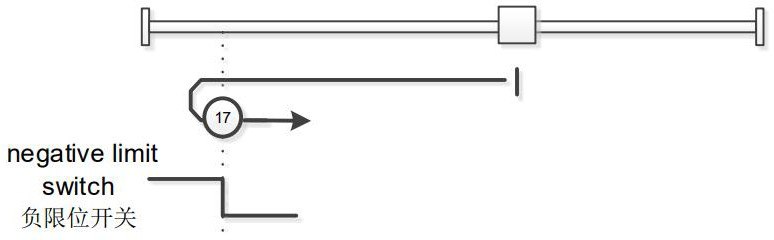
方法17:檢測負限位變化的位置
A:回零啟動時負限位開關無效,驅動器首先以0x6099.1的高速向負方向移動,直到遇到負限位開關信號變為有效時,減速停止;然后驅動器以0x6099.2的低速向正方向移動,當遇到負限位信號變為無效時停止,然后將當前位置設為零點。
B:回零啟動時負限位開關有效,驅動器直接正向緩慢運行,當遇到負限位開關信號無效時停止,然后將當前位置設為零點。
C:如果在運動過程中正限位信號有效,狀態字(6041h)位13將有效,表示原點運動錯誤,電機將立即停止。
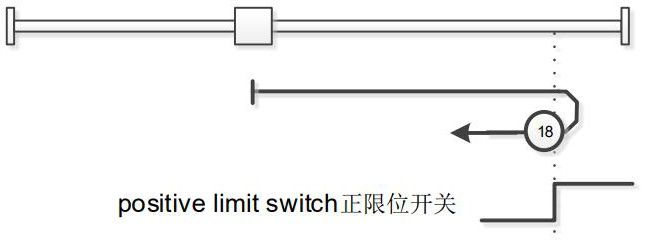
方法18:檢測正限位變化的位置
A:回零啟動時負限位開關無效,驅動器首先以0x6099.1的高速向正方向移動,直到遇到正限位開關信號變為有效時,減速停止;然后驅動器以0x6099.2的低速向負方向移動,當遇到正限位信號變為無效時停止,然后將當前位置設為零點。
B:回零啟動時負限位開關有效,驅動器直接負向緩慢運行,當遇到正限位開關信號無效時停止,然后將當前位置設為零點。
C:如果在運動過程中負限位信號有效,狀態字(6041h)位13將有效,表示原點運動錯誤,電機將立即停止。
方法35:將當前位置點設為零點。
使用該方法時電機處于運行或者不運行的情況下,都可以將當前位置設為零點。
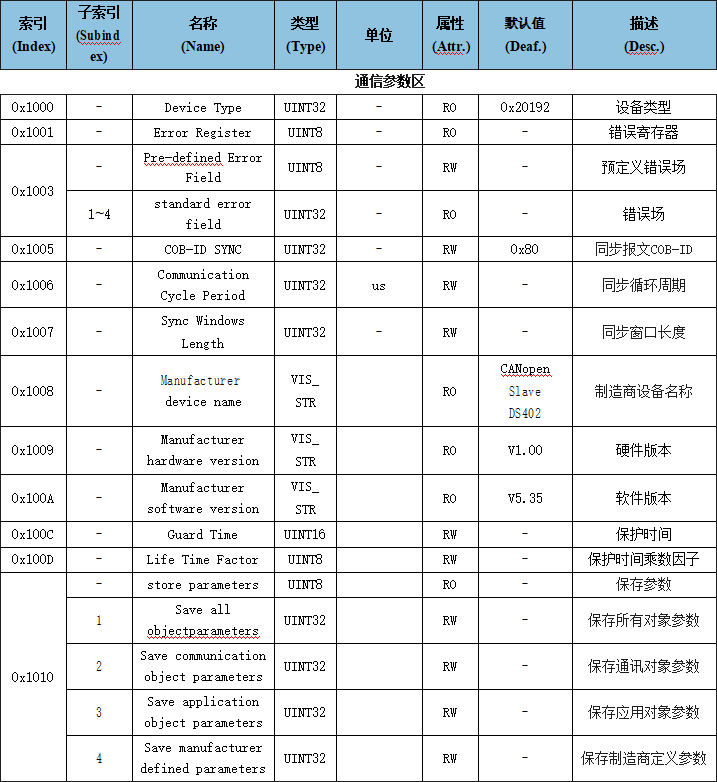
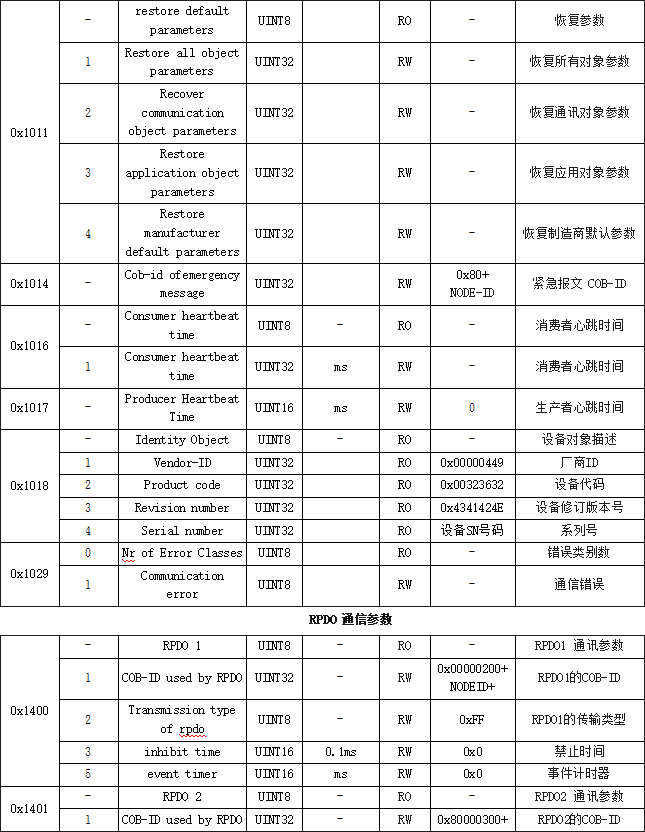
九、對象字典
1、對象字典一覽
2、對象字典詳細說明
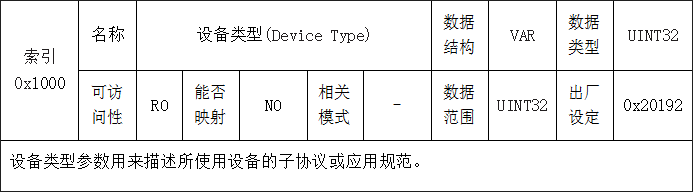
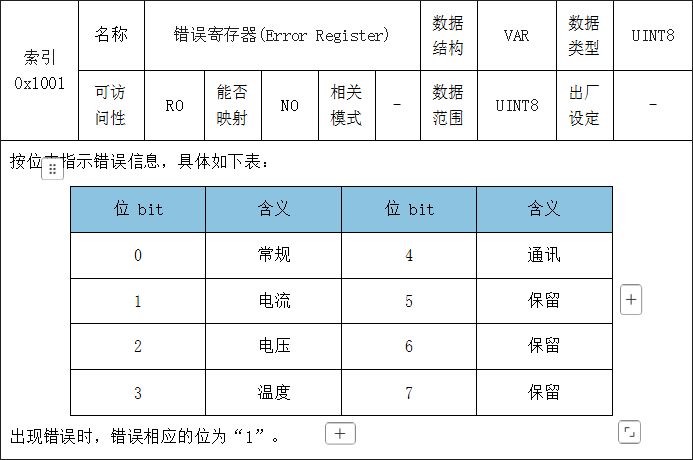
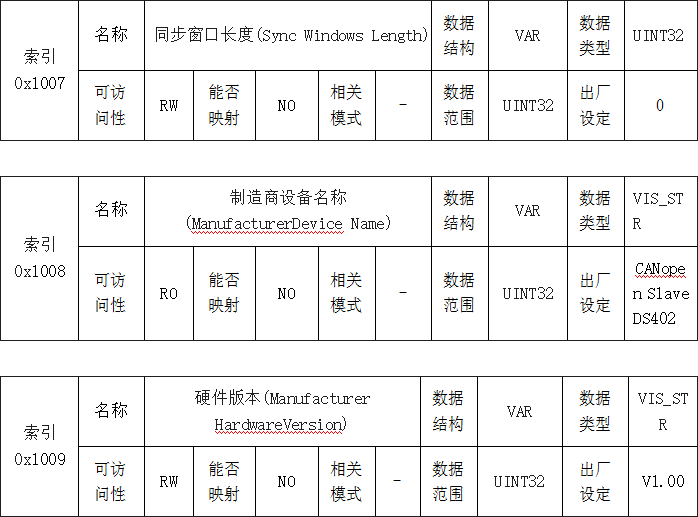
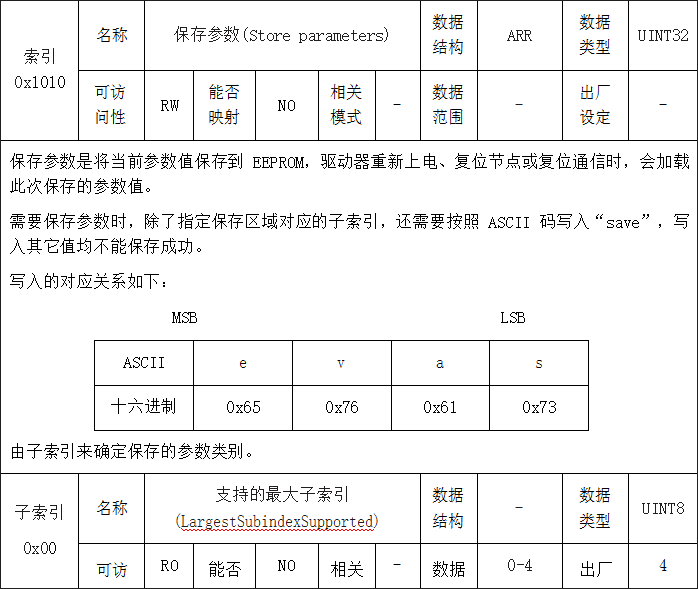
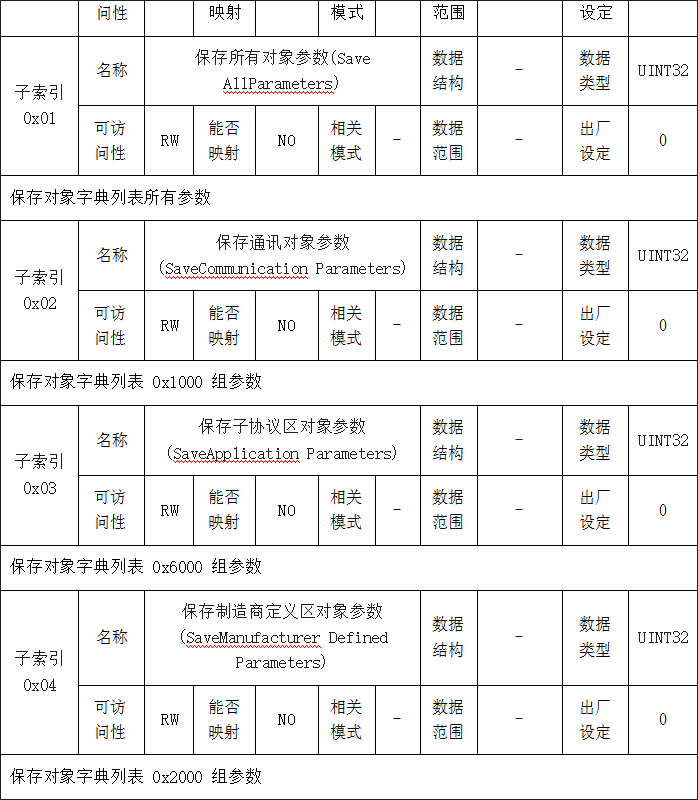
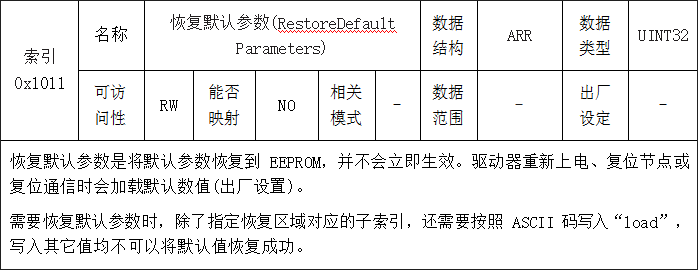
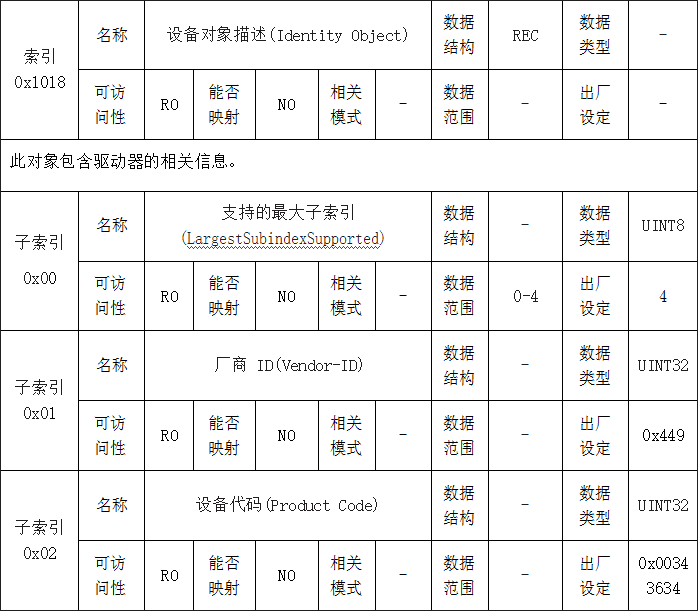
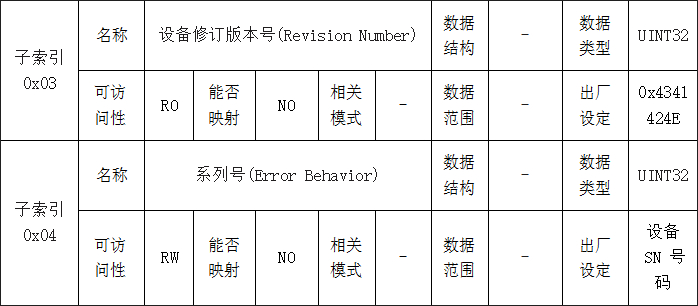
(1)對象字典0x1XXX通訊對象詳細說明
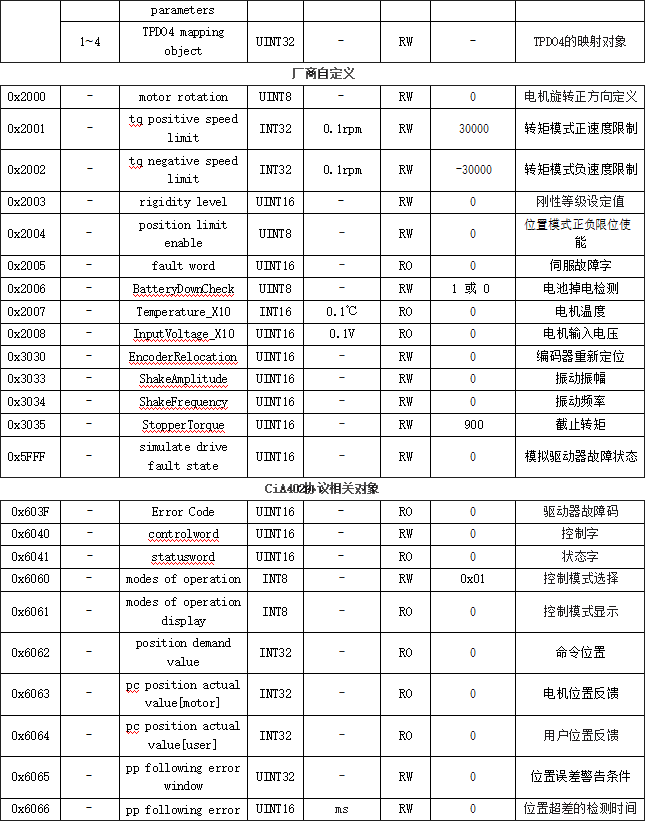
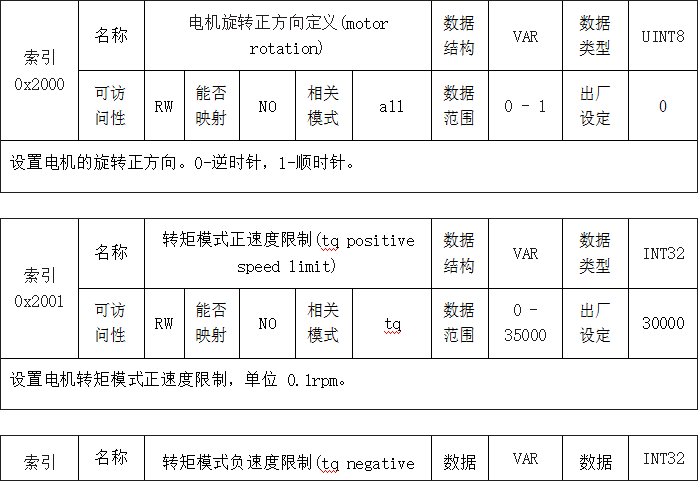
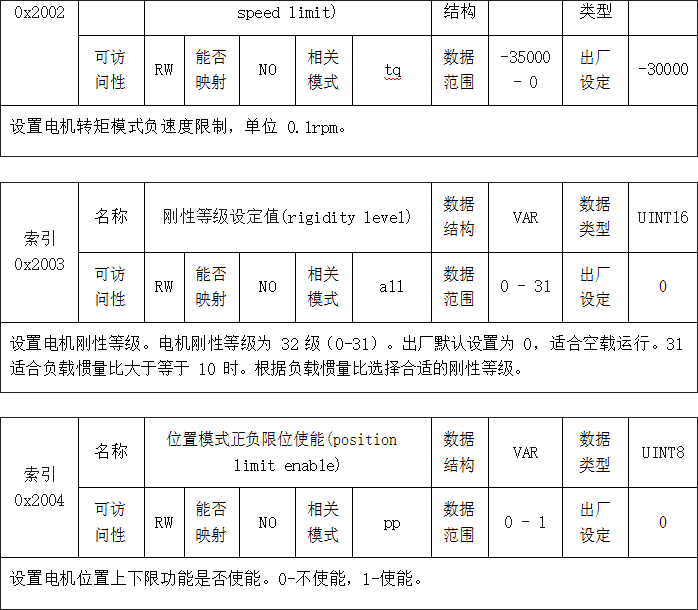
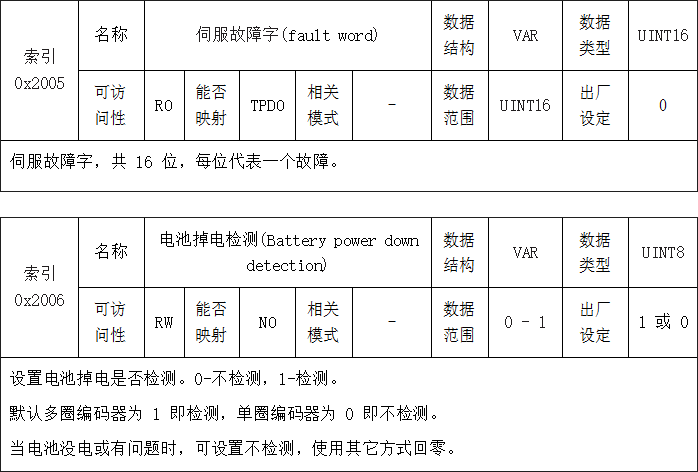
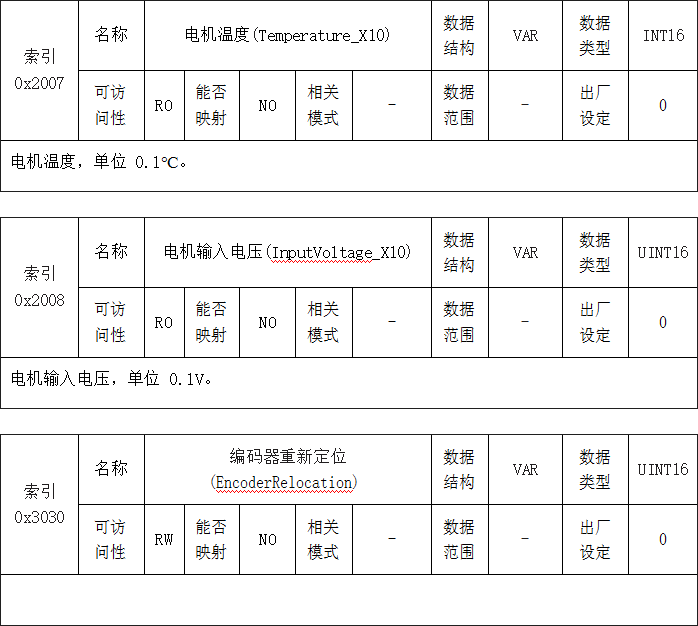
(2)對象字典0x2XXX,0x3XXX,0x5XXX自定義參數詳細說明
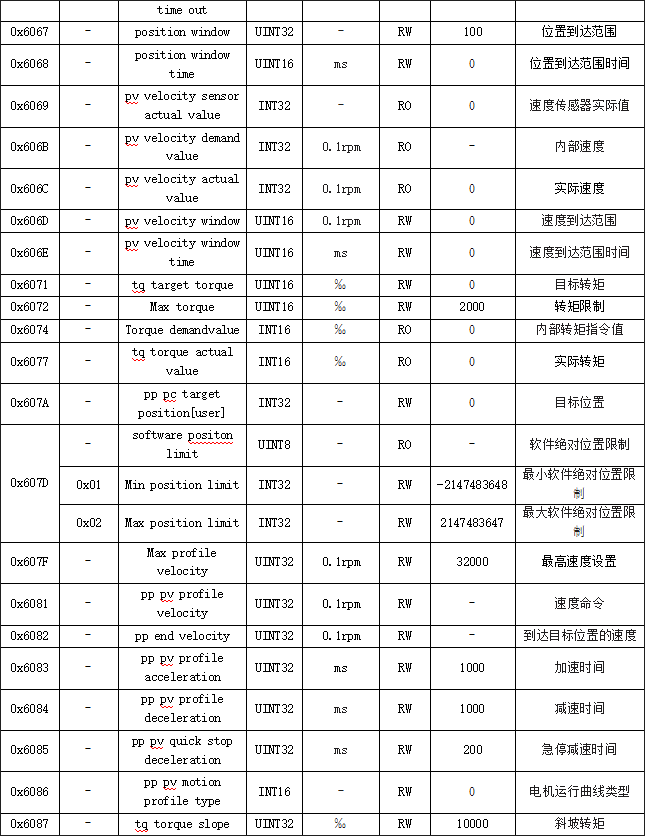
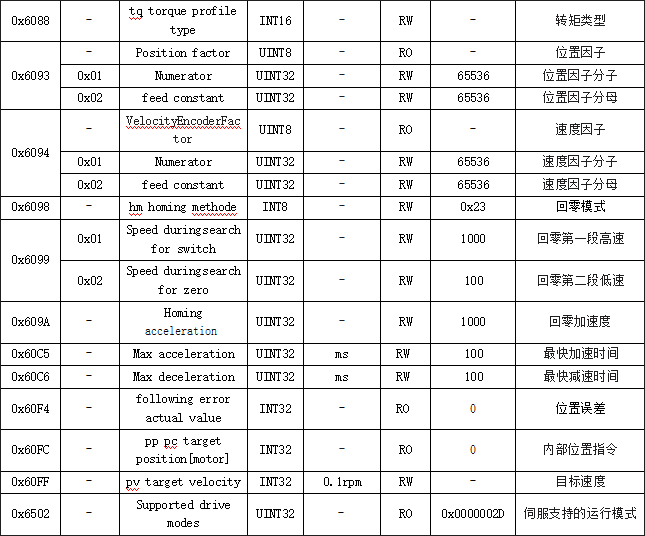
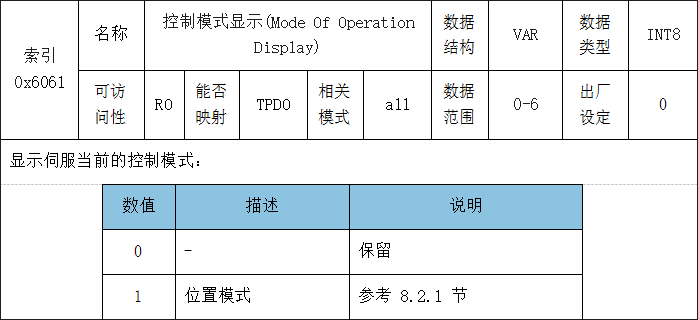
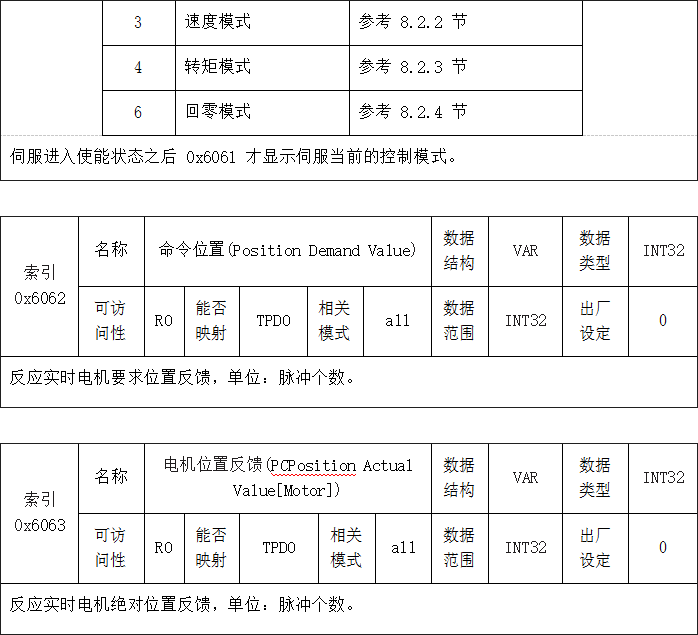
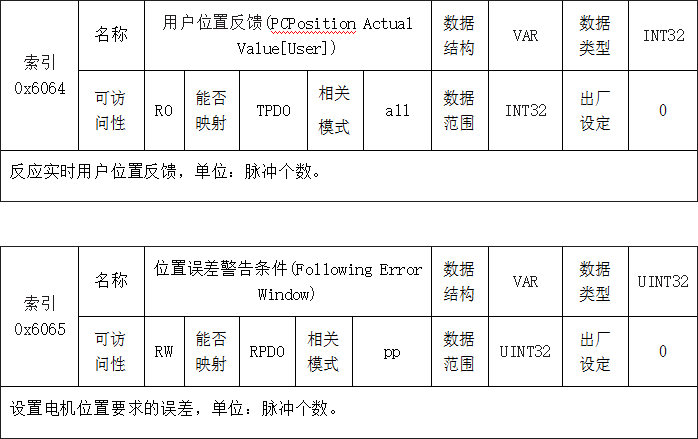
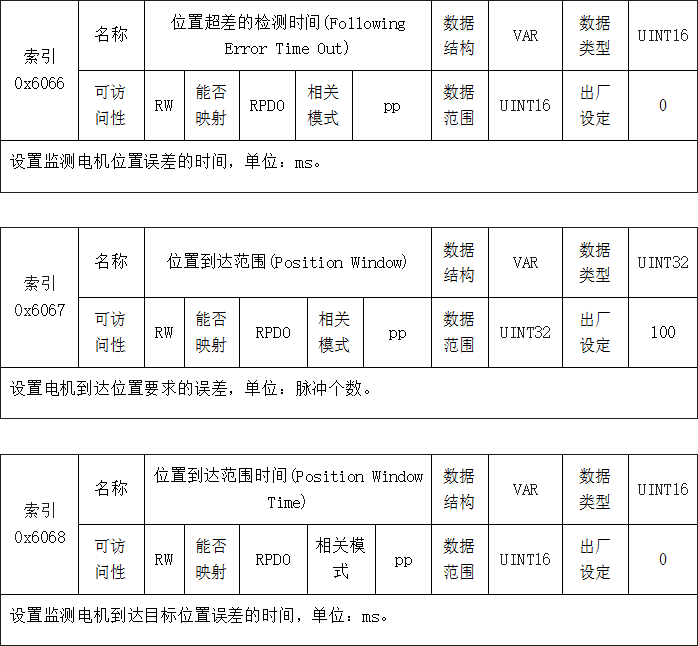
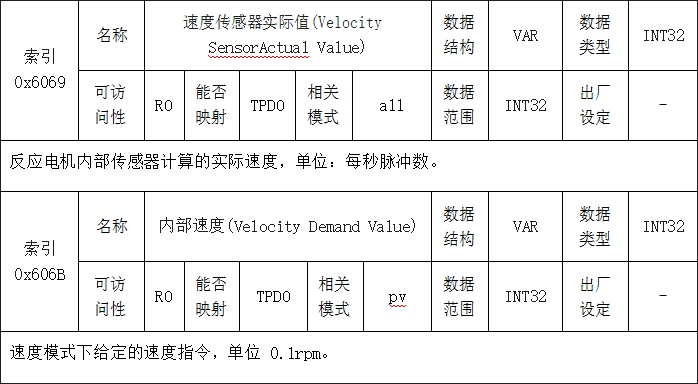
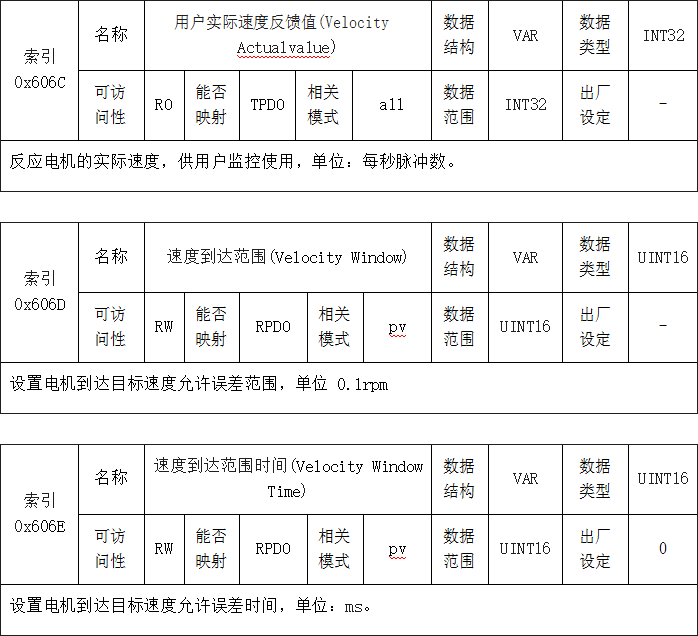
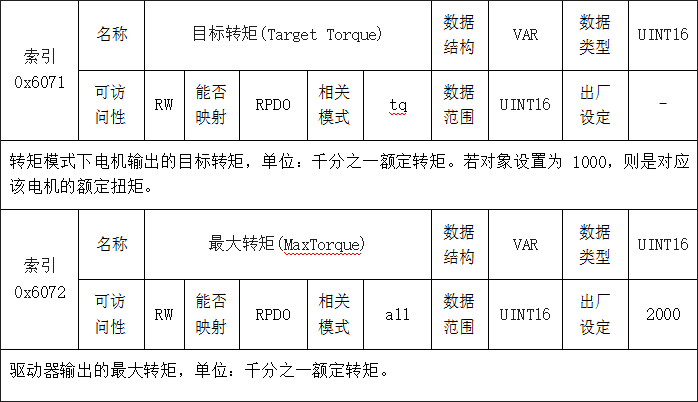
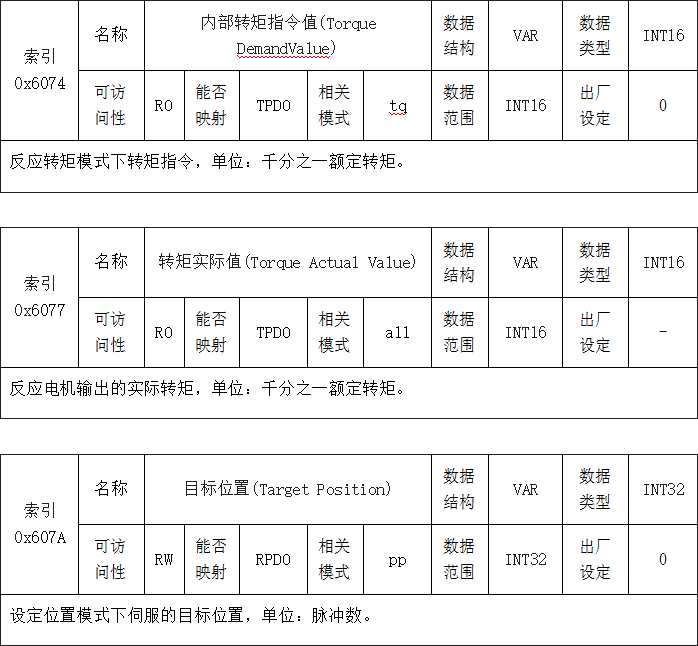
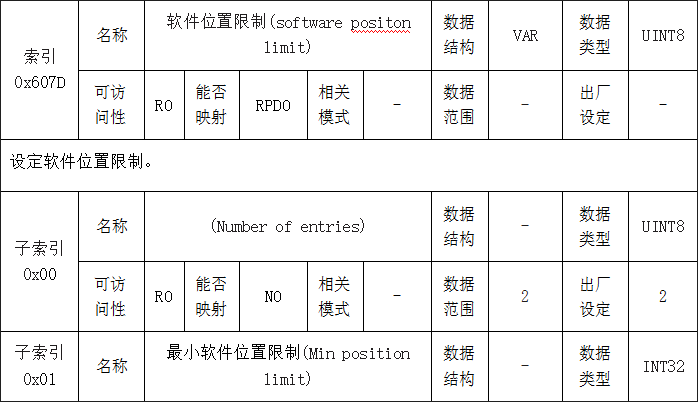
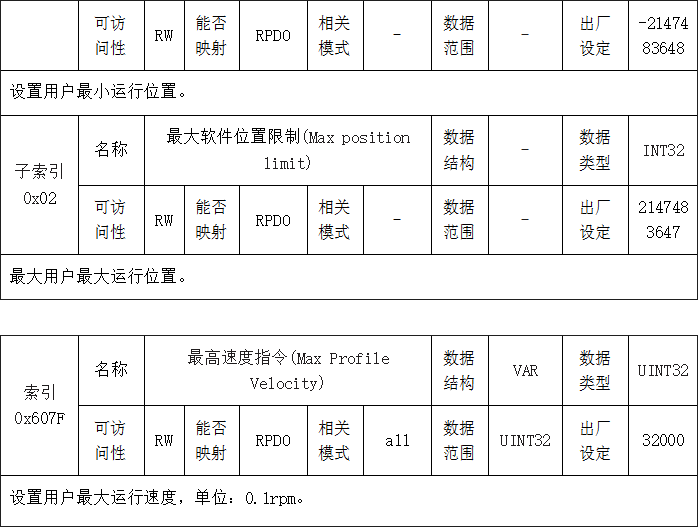
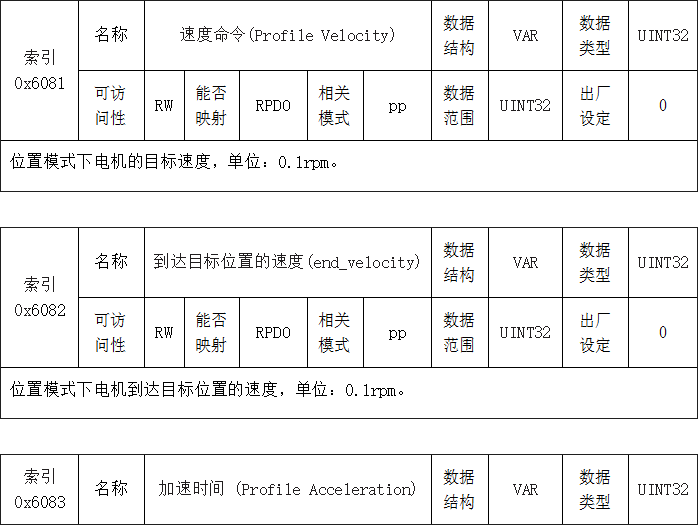
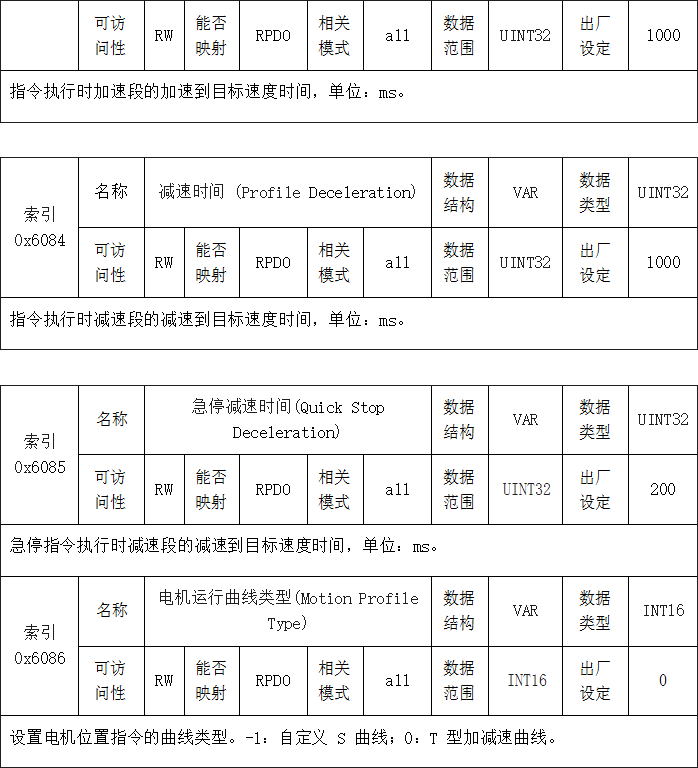
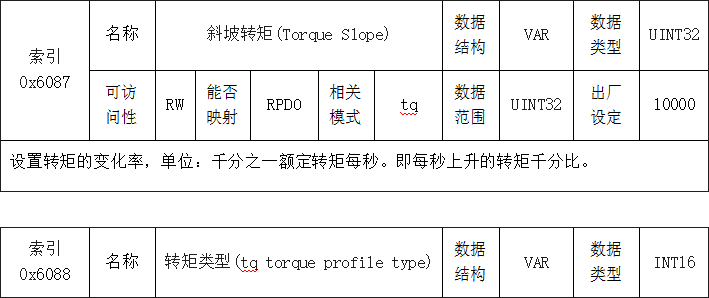
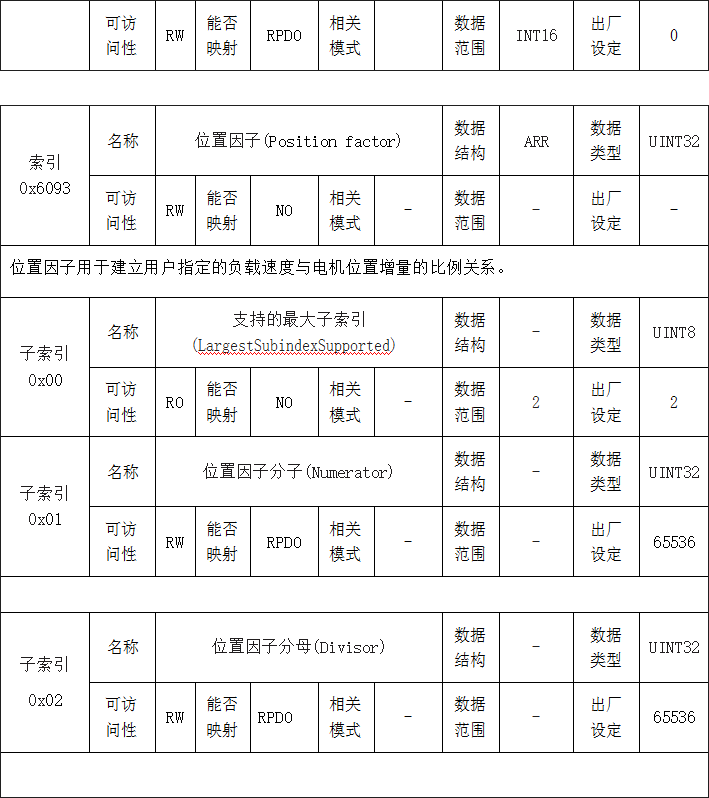
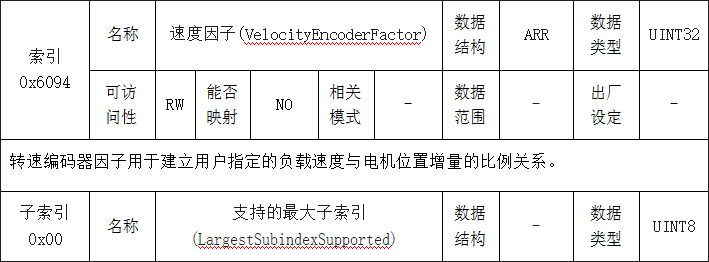
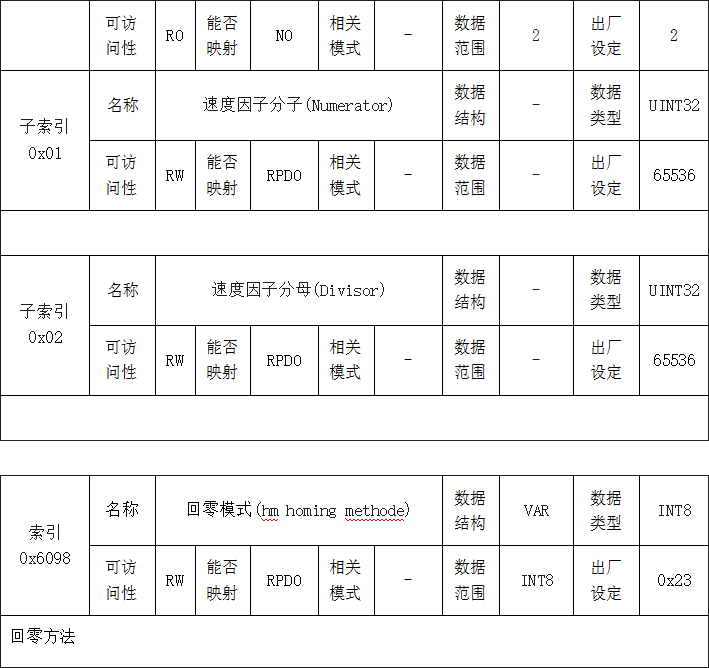
(3)對象字典0x6XXX子協議參數詳細說明
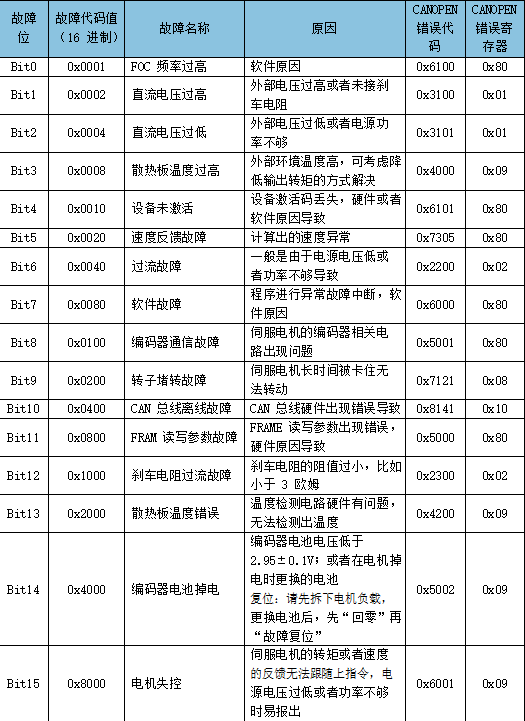
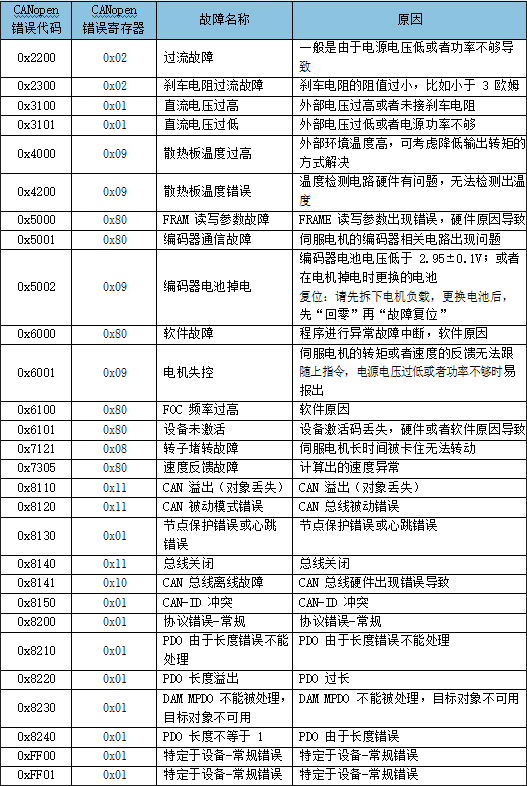
十、故障說明
故障字(0x2005)說明
CANopen錯誤碼(0x603F)說明
如果您需要詢價沈陽廣成科技永磁一體式交流伺服電機或進行技術咨詢,可以加微信13019325660或撥打電話。





 ● 退出:退出軟件,斷開連接。
● 退出:退出軟件,斷開連接。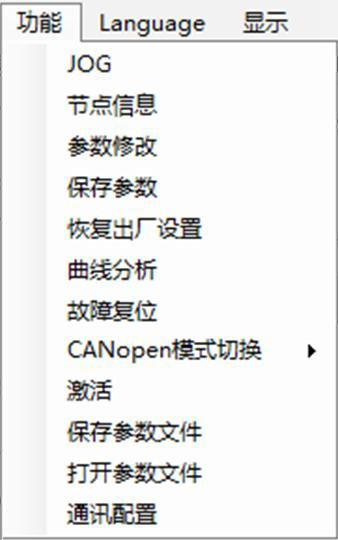
 ● 簡體中文:軟件語言切換至簡體中文。
● 簡體中文:軟件語言切換至簡體中文。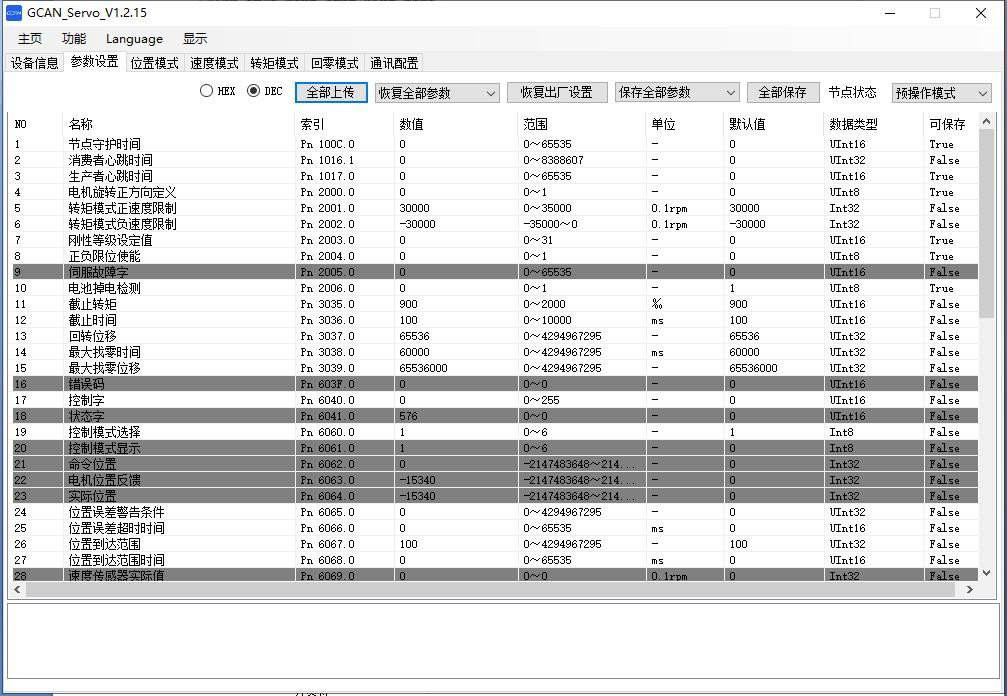
 3.在彈出的“JOG”對話框中設定如下參數。
3.在彈出的“JOG”對話框中設定如下參數。








 被讀取的對象字典中數據類型的長度為16位時從機回復:
被讀取的對象字典中數據類型的長度為16位時從機回復: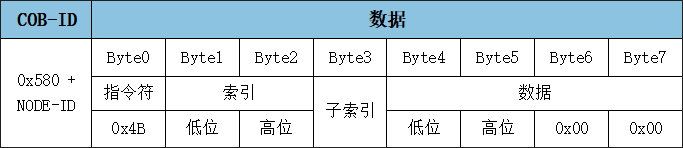




















 2.回零模式操作舉例
2.回零模式操作舉例

 方法17操作舉例:
方法17操作舉例: