弗仕德科技有限公司欄目")
GCAN-4057型CANopen IO模塊8DI 8DO


- 品牌:
- GCAN廣成科技
- 型號(hào):
- GCAN-4057
- 應(yīng)用:
- GCAN-4057模塊是集成1路標(biāo)準(zhǔn)CAN/CANopen接口、8路開關(guān)量輸入通道、8路開關(guān)量輸出通道的工業(yè)級(jí)CANopen數(shù)字量輸入輸出模塊。采用GCAN-4057模塊,用戶可用于采集數(shù)字量輸入信號(hào),并輸出數(shù)字量信號(hào),控制開關(guān),實(shí)現(xiàn)遠(yuǎn)程開關(guān)設(shè)備和CANopen網(wǎng)絡(luò)之間的連接,構(gòu)成CANopen網(wǎng)絡(luò)中數(shù)據(jù)量信號(hào)采集、輸出的控制節(jié)點(diǎn)。
-

一、功能概述
沈陽(yáng)廣成科技GCAN-4057模塊是集成1路標(biāo)準(zhǔn)CAN/CANopen接口、8路開關(guān)量輸入通道、8路開關(guān)量輸出通道的工業(yè)級(jí)CANopen數(shù)字量輸入輸出模塊。采用GCAN-4057模塊,用戶可用于采集數(shù)字量輸入信號(hào),并輸出數(shù)字量信號(hào),控制開關(guān),實(shí)現(xiàn)遠(yuǎn)程開關(guān)設(shè)備和CANopen網(wǎng)絡(luò)之間的連接,構(gòu)成CANopen網(wǎng)絡(luò)中數(shù)據(jù)量信號(hào)采集、輸出的控制節(jié)點(diǎn)。GCAN-4057模塊是數(shù)字量信號(hào)采集和輸出的關(guān)鍵性工具,同時(shí)該模塊具有體積小巧、接線便捷等特點(diǎn)。GCAN-4057模塊的總線接口集成隔離保護(hù)模塊,使其避免由于瞬間的過壓過流而對(duì)模塊造成損壞。采用DIN導(dǎo)軌的固定方式,可使其更容易集成到各種控制柜中。
二、設(shè)備參數(shù)
沈陽(yáng)廣成科技GCAN-4057模塊的設(shè)備參數(shù)包括:
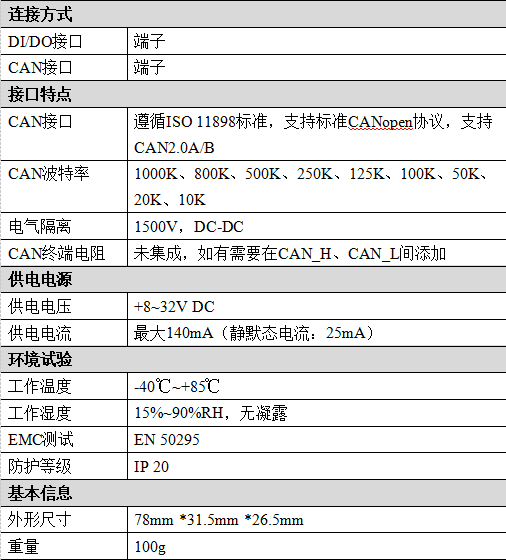
(1)CAN-bus支持CAN2.0A和CAN2.0B幀格式,符合ISO/DIS 11898規(guī)范;(2)CAN-bus通訊波特率在10Kbps~1Mbps之間任意可編程;(3)CAN-bus接口采用電氣隔離,隔離模塊絕緣電壓:1500V DC;(4)使用9~30V DC供電,140mA(靜默態(tài)電流:40mA);(5)數(shù)字量輸入通道數(shù):8路;(6)數(shù)字量輸出通道數(shù):8路;(7)數(shù)字量輸入信號(hào):支持PNP型、NPN型,通過COM端切換;(8)數(shù)字量輸入高電平信號(hào)(數(shù)字1):+5V~30V;(9)數(shù)字量輸入低電平信號(hào)(數(shù)字0):≤+3V;(10)數(shù)字量輸出信號(hào):PNP輸出,單路最大500mA;8路同時(shí)輸出350mA/每路;(11)DI、DO、CANopen接口使用端子接口;(12)使用撥碼開關(guān)配置模塊波特率及節(jié)點(diǎn)號(hào);(13)靜電放電抗擾度等級(jí):接觸放電±4kV,空氣放電±8kV;(14)電快速瞬變脈沖群抗擾度等級(jí):電源接口、CAN接口±2kV;IO接口±1kV;(15)浪涌抗擾度等級(jí):電源接口、IO接口±1kV、CAN接口±4kV;(16)可用配套卡軌連接件,安裝到DIN卡軌上;(17)工作溫度范圍:-40℃~+85℃;

三、應(yīng)用領(lǐng)域
沈陽(yáng)廣成科技GCAN-4057模塊的設(shè)備應(yīng)用領(lǐng)域包括:
(1)工業(yè)現(xiàn)場(chǎng)網(wǎng)絡(luò)數(shù)據(jù)監(jiān)控;(2)煤礦、油井遠(yuǎn)程通訊;(3)CAN教學(xué)應(yīng)用遠(yuǎn)程通訊;(4)CAN工業(yè)自動(dòng)化控制系統(tǒng);(5)智能樓宇控制數(shù)據(jù)廣播系統(tǒng)等CAN-bus應(yīng)用系統(tǒng)。
如果您需要詢價(jià)沈陽(yáng)廣成科技GCAN-4057模塊或進(jìn)行技術(shù)咨詢,可以加微信13019325660或撥打電話。
四、設(shè)備安裝
1、設(shè)備尺寸
設(shè)備外形尺寸:(長(zhǎng),含接線端子)122mm*(寬)70mm*(高)25mm,其示意圖如圖所示。
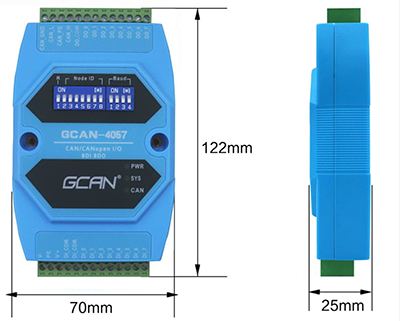
GCAN-4057外形尺寸
2、接口定義及功能
GCAN-4057模塊集成一路9-30V DC電源接口、1路標(biāo)準(zhǔn)CANopen接口、8路開關(guān)量輸入接口、8路開關(guān)量輸出接口。GCAN-4057模塊電源接口、8路開關(guān)量輸入接口位置如圖所示,接口定義如表所示。

電源及8路開關(guān)量輸入接口位置
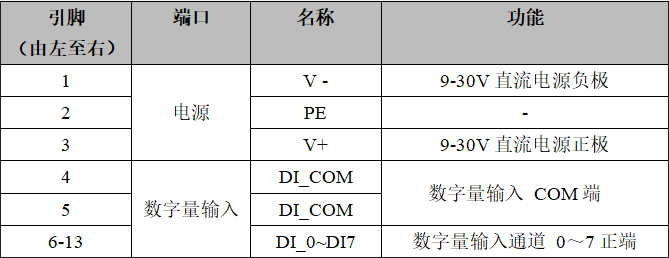
電源及8路開關(guān)量輸入接口定義
GCAN-4057模塊CAN-bus通道,由1個(gè)4 Pin插拔式接線端子引出,可以用于連接1個(gè)CAN-bus網(wǎng)絡(luò)或者CAN-bus接口的設(shè)備。GCAN-4057模塊CAN-bus接口、8路開關(guān)量輸出接口位置如圖所示,接口定義如表所示。

CAN-bus接口、8路開關(guān)量輸出接口位置
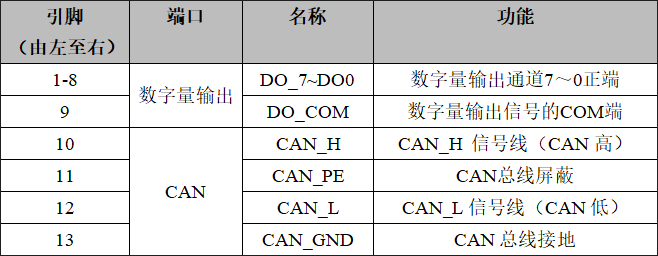
CAN-bus接口、8路開關(guān)量輸出接口定義
GCAN-4057模塊源型輸入、PNP輸出接線如圖所示:

GCAN-4057模塊源型輸入、PNP輸出接線圖
GCAN-4057模塊漏型輸入、PNP輸出接線如圖所示:
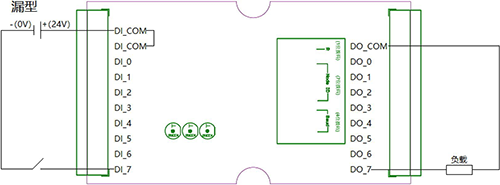
GCAN-4057模塊漏型輸入、PNP輸出接線圖
GCAN-4057模塊撥碼開關(guān)如圖所示,GCAN-4057模塊撥碼開關(guān)最左側(cè)為復(fù)位按鍵,默認(rèn)在下方,上電時(shí)撥上,再撥下,重新上電后恢復(fù)出廠設(shè)置。復(fù)位按鍵右側(cè)7位為節(jié)點(diǎn)號(hào)設(shè)置開關(guān)。最右側(cè)4位為波特率設(shè)置開關(guān)。左側(cè)為高位,右側(cè)為低位。

GCAN-4057模塊撥碼開關(guān)五、設(shè)備使用
1、電源連接
GCAN-4057模塊支持工業(yè)現(xiàn)場(chǎng)常見的+9~30V DC直流電源。為保證模塊可靠工作,建議使用+12V或+24V的DC直流穩(wěn)壓電源。
2、系統(tǒng)狀態(tài)指示燈
GCAN-4057模塊具有1個(gè)PWR指示燈、1個(gè)SYS指示燈、1個(gè)CAN指示燈來指示設(shè)備的運(yùn)行狀態(tài)。這3種指示燈的具體指示功能及狀態(tài)如表所示。
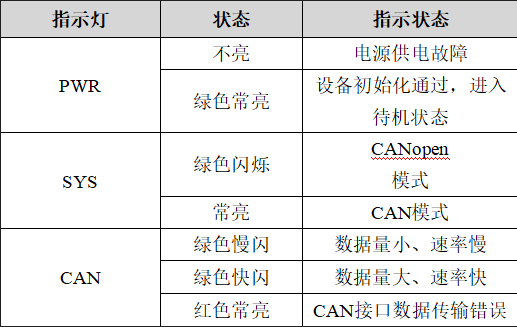
GCAN-4057模塊指示燈狀態(tài)
● 默認(rèn)CANopen模式,GCAN-4057模塊上電后,PWR、SYS、CAN三個(gè)指示燈立即點(diǎn)亮;● 當(dāng)GCAN-4057模塊自檢完成后,SYS燈綠色閃爍,如下圖所示;● 當(dāng)CAN端有數(shù)據(jù)傳輸時(shí),CAN燈呈現(xiàn)綠色閃爍,如下圖所示;

GCAN-4057 PWR、SYS和CAN燈狀態(tài)
● CAN模式,SYS燈常亮,如上圖所示;● 如果CAN總線出現(xiàn)通訊錯(cuò)誤,CAN燈將變紅,如下圖所示。

GCAN-4057 CAN燈狀態(tài)
六、配置說明
用戶可使用模塊上方的撥碼開關(guān)自行設(shè)定GCAN-4057模塊的參數(shù),以滿足實(shí)際應(yīng)用場(chǎng)合的需要。GCAN-4057模塊的配置,包括模塊的節(jié)點(diǎn)號(hào)和波特率兩部分。
請(qǐng)注意:通過撥碼開關(guān)改變GCAN-4057模塊的參數(shù)之后,需要重新對(duì)模塊上電之后,新的參數(shù)才會(huì)生效。
1、CAN節(jié)點(diǎn)號(hào)配置
如圖所示,撥碼開關(guān)的每個(gè)位撥向“ON”位置時(shí),該位為“1”,如果撥向“OFF”位置,則該位為“0”。撥碼開關(guān)的2—8位用于設(shè)定模塊的節(jié)點(diǎn)號(hào)(NODE ID),第八位為最低位,第二位為最高位,模塊的節(jié)點(diǎn)號(hào)(NODE ID)是各位對(duì)應(yīng)的十進(jìn)制值之和,通過撥碼開關(guān)設(shè)定模塊的節(jié)點(diǎn)號(hào)(NODE ID)的有效范圍為0~127。
請(qǐng)注意:撥碼開關(guān)第一位為復(fù)位撥碼,默認(rèn)為OFF(下方),上電時(shí)撥上,再撥下,重新上電后恢復(fù)出廠設(shè)置。
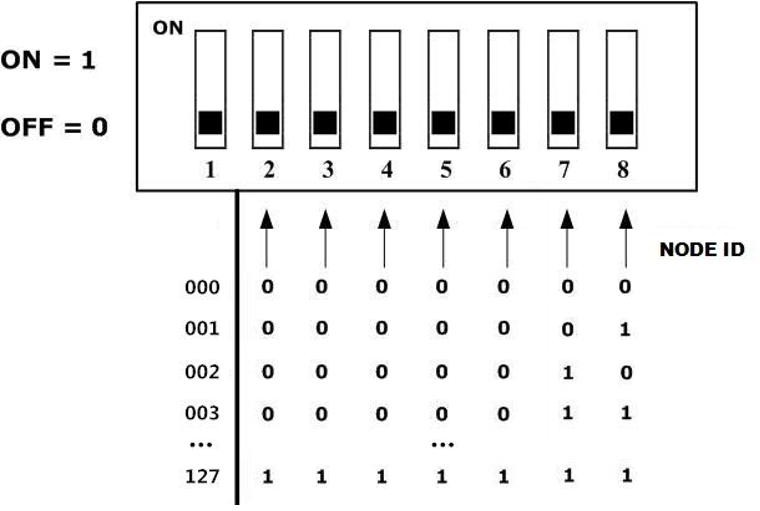
CAN節(jié)點(diǎn)號(hào)配置說明
2、CAN波特率配置
右側(cè)撥碼開關(guān)的1-4位用于設(shè)定模塊的波特率,第一位為低位,第四位為高位。波特率與開關(guān)設(shè)置對(duì)應(yīng)值如下表所示。
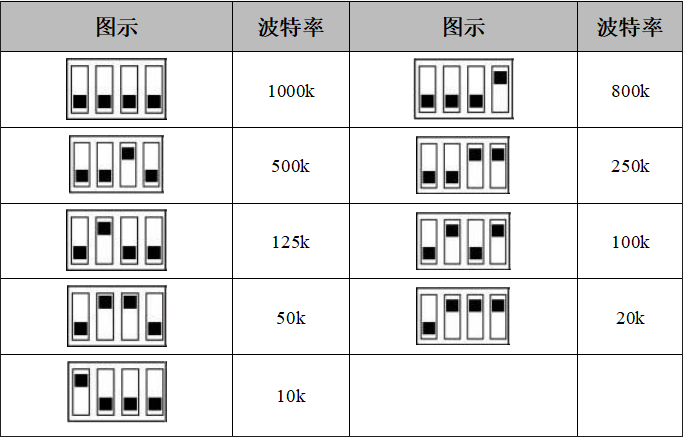
CAN波特率配置說明
七、快速上手
GCAN-4057模塊支持CANopen和CAN兩種模式,默認(rèn)CANopen模式,使用說明如下:
GCAN-4057模塊默認(rèn)上電后切換至CANopen模式的05啟動(dòng)狀態(tài),默認(rèn)模塊上電后立即對(duì)數(shù)字量信號(hào)進(jìn)行采集并可控制(寫入)輸出。
例如:默認(rèn)GCAN-4057的Node ID為1(以下節(jié)點(diǎn)號(hào)均為1),則主站設(shè)備可接收到一條節(jié)點(diǎn)狀態(tài)數(shù)據(jù),幀ID為0x701,標(biāo)準(zhǔn)幀,數(shù)據(jù)為0x05,默認(rèn)心跳時(shí)間100ms。

數(shù)據(jù)采集:
當(dāng)前狀態(tài),TPDO1用于表示數(shù)字量DI狀態(tài),如圖所示,幀ID為0x180+Node ID,默認(rèn)幀數(shù)據(jù)第一個(gè)字節(jié)為數(shù)字量輸入狀態(tài)。
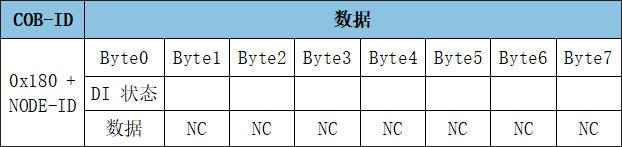
默認(rèn)第8路在高位,第1路在低位。例如,GCAN-4057模塊節(jié)點(diǎn)號(hào)設(shè)為1。此時(shí)第1路輸入狀態(tài)為1,其余DI狀態(tài)均為0。則CAN總線主站一端接收的DI狀態(tài)數(shù)據(jù)為0x01。

此時(shí)第8路輸入狀態(tài)為1,其余DI狀態(tài)均為0。則CAN總線主站一端接收的DI狀態(tài)數(shù)據(jù)為0x80。

控制輸出:
RPDO1用于表示控制(寫入)數(shù)字量輸出的狀態(tài),幀ID為0x200+Node ID,數(shù)字量輸出默認(rèn)由一個(gè)字節(jié)來控制(寫入)。
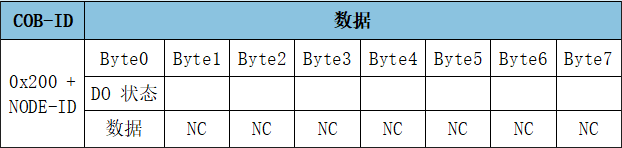
默認(rèn)第8路在高位,第1路在低位。例如,GCAN-4057模塊節(jié)點(diǎn)號(hào)設(shè)為1。若需要設(shè)置第4路狀態(tài)為1,其余DO狀態(tài)均為0,則CAN總線主站一端發(fā)送的幀ID為0x201,幀數(shù)據(jù)為0x08。

若需要設(shè)置第8路狀態(tài)為1,其余DO狀態(tài)均為0,則CAN總線主站一端發(fā)送的幀ID為0x201,幀數(shù)據(jù)為0x80。

八、相關(guān)參數(shù)配置
1、SDO命令
服務(wù)數(shù)據(jù)對(duì)象SDO(ServiceDataObjects)主要用來訪問節(jié)點(diǎn)的對(duì)象字典,可以直接對(duì)GCAN-4057的參數(shù)進(jìn)行讀寫配置。只有在默認(rèn)或CANopen模式下可配置相關(guān)參數(shù),配置后需重新上電生效。
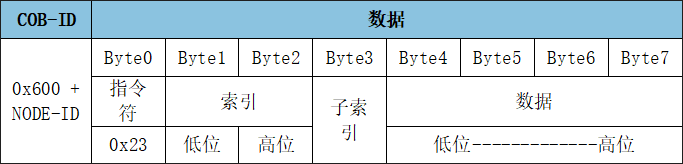
(1)SDO寫入對(duì)象字典
SDO寫入對(duì)象字典中數(shù)據(jù)類型的長(zhǎng)度為32位參數(shù)命令:
SDO寫入對(duì)象字典中數(shù)據(jù)類型的長(zhǎng)度為16位參數(shù)命令:

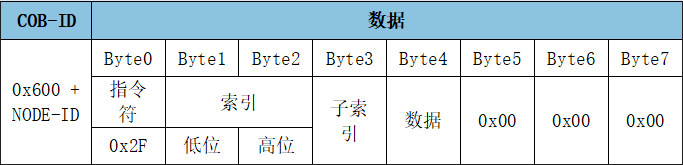
SDO寫入對(duì)象字典中數(shù)據(jù)類型的長(zhǎng)度為8位參數(shù)命令:
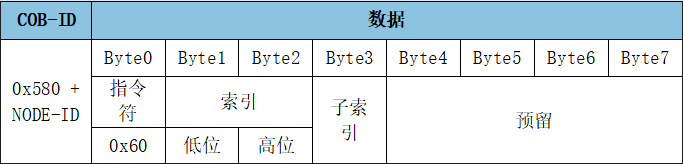
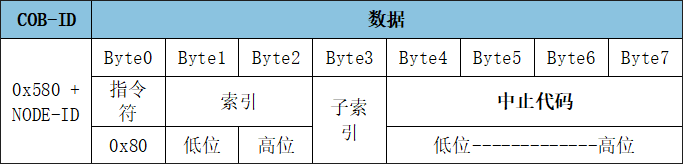
從機(jī)應(yīng)答寫入對(duì)象字典的值寫入成功:
從機(jī)應(yīng)答寫入對(duì)象字典的值寫入失敗:
2、修改使用模式
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改模塊的使用模式。該參數(shù)位于對(duì)象字典索引0x2400、子索引0x00,數(shù)據(jù)類型Unsigned8。

數(shù)據(jù)舉例:
2F 00 24 00 01 00 00 00,設(shè)置模塊為01即CAN模式。
3、修改默認(rèn)模式及CANopen模式相關(guān)參數(shù)
(1)修改每一路DI的顯示位置
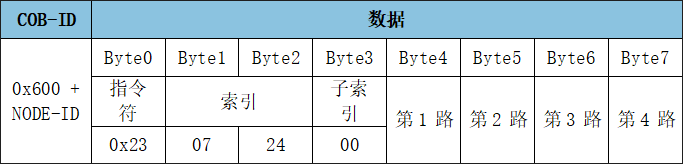
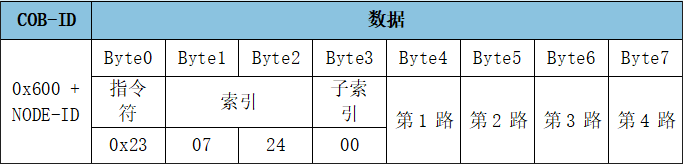
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改每一路DI的顯示位置。前4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2407、子索引0x00,數(shù)據(jù)類型Unsigned32。
最多設(shè)置在第64位顯示。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
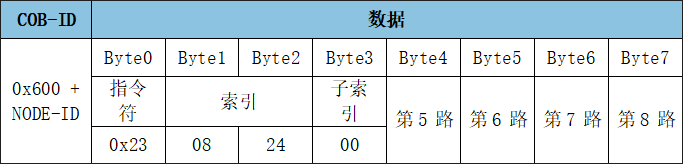
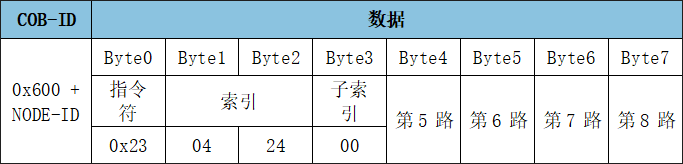
后4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2408、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位顯示。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
數(shù)據(jù)舉例:
23 07 24 00 02 14 28 3C,設(shè)置模塊第4路在0x3C即十進(jìn)制第60位顯示,模塊第3路在0x28即十進(jìn)制第40位顯示,模塊第2路在0x14即十進(jìn)制第20位顯示,模塊第1路在0x02即十進(jìn)制第2位顯示。
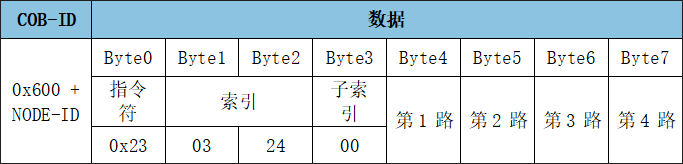
(2)修改每一路DO的寫入位置
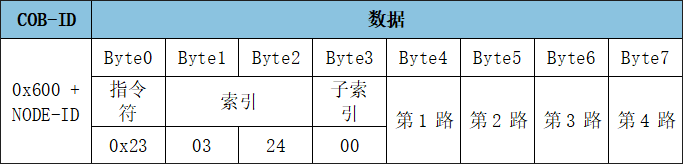
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改每一路DO的寫入位置。前4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2403、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
后4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2404、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。

數(shù)據(jù)舉例:
23 03 24 00 02 14 28 3C,設(shè)置模塊第4路在0x3C即十進(jìn)制第60位可被寫入,模塊第3路在0x28即十進(jìn)制第40位可被寫入,模塊第2路在0x14即十進(jìn)制第20位可被寫入,模塊第1路在0x02即十進(jìn)制第2位可被寫入。
4、修改CAN模式下相關(guān)參數(shù)
(1)修改CAN模式下DI輸入數(shù)據(jù)長(zhǎng)度、循環(huán)時(shí)間GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改DI數(shù)據(jù)長(zhǎng)度、循環(huán)時(shí)間。該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2402、子索引0x00,數(shù)據(jù)類型Unsigned32。
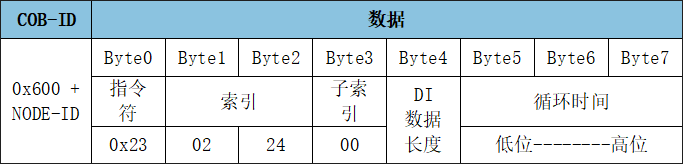
數(shù)據(jù)舉例:
23 02 24 00 08 E8 03 00,設(shè)置模塊輸入長(zhǎng)度為8個(gè)字節(jié),循環(huán)時(shí)間為0x03E8轉(zhuǎn)換為10進(jìn)制是1000ms。
(2)修改每一路DI的顯示位置
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改每一路DI的顯示位置。前4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2407、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位顯示。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
后4路傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2408、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位顯示。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。

數(shù)據(jù)舉例:
23 07 24 00 02 14 28 3C,設(shè)置模塊第4路在0x3C即十進(jìn)制第60位顯示,模塊第3路在0x28即十進(jìn)制第40位顯示,模塊第2路在0x14即十進(jìn)制第20位顯示,模塊第1路在0x02即十進(jìn)制第2位顯示。
(3)修改CAN模式下輸出DO超時(shí)時(shí)間、DO數(shù)據(jù)長(zhǎng)度
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改DO超時(shí)時(shí)間,DO數(shù)據(jù)長(zhǎng)度。該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2401、子索引0x00,數(shù)據(jù)類型Unsigned8。超時(shí)時(shí)間:默認(rèn)輸出2S后,4057模塊停止輸出。

數(shù)據(jù)舉例:
2F 01 24 00 08 00 00 00,設(shè)置模塊輸出數(shù)據(jù)長(zhǎng)度為8個(gè)字節(jié),無超時(shí)時(shí)間。
(4)修改每一路DO的寫入位置
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改每一路DO的寫入位置。前4路該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2403、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
后4路該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2404、子索引0x00,數(shù)據(jù)類型Unsigned32。最多設(shè)置在第64位。換算成16進(jìn)制,數(shù)據(jù)最低0x01,最高0x40,0x00或者0x40以上不生效。
數(shù)據(jù)舉例:
23 03 24 00 02 14 28 3C,設(shè)置模塊第4路在0x3C即十進(jìn)制第60位可被寫入,模塊第3路在0x28即十進(jìn)制第40位可被寫入,模塊第2路在0x14即十進(jìn)制第20位可被寫入,模塊第1路在0x02即十進(jìn)制第2位可被寫入。
(5)修改輸入數(shù)據(jù)幀ID
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改模塊的輸入幀ID。該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2406、子索引0x00,數(shù)據(jù)類型Unsigned32。輸入數(shù)據(jù)幀ID,指的是CAN模式下,輸入DI數(shù)據(jù)的幀ID。
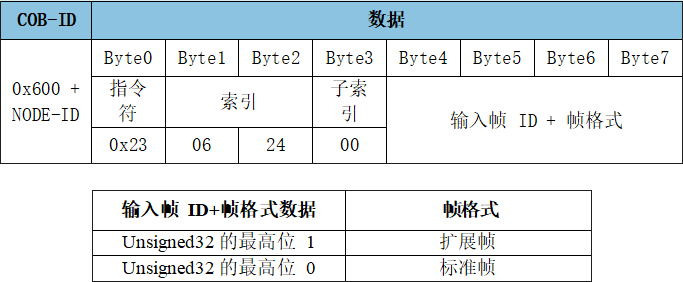
數(shù)據(jù)舉例:
23 06 24 00 01 00 00 00,設(shè)置模塊輸入數(shù)據(jù)幀ID為0x001,幀格式為標(biāo)準(zhǔn)幀。
23 06 24 00 00 08 00 80,設(shè)置模塊輸入數(shù)據(jù)幀ID為0x00000800,幀格式為擴(kuò)展幀。
(6)修改輸出數(shù)據(jù)幀ID
GCAN-4057模塊可通過發(fā)送SDO命令寫參數(shù),修改模塊的輸出數(shù)據(jù)幀ID。該傳輸類型的數(shù)據(jù)位于對(duì)象字典索引0x2405、子索引0x00,數(shù)據(jù)類型Unsigned32。輸出數(shù)據(jù)幀ID,指的是CAN模式下,通過幀ID控制DO輸出。

數(shù)據(jù)舉例:
23 05 24 00 01 00 00 00,設(shè)置模塊輸出數(shù)據(jù)幀ID為0x001,幀格式為標(biāo)準(zhǔn)幀。
23 05 24 00 00 08 00 80,設(shè)置模塊輸出數(shù)據(jù)幀ID為0x00000800,幀格式為擴(kuò)展幀。
九、標(biāo)準(zhǔn)CANopen模式配置及使用
1、配置操作舉例
CANopen模式配置操作舉例:(以節(jié)點(diǎn)號(hào)為1舉例)默認(rèn)模式上電后:
1、模塊配置為標(biāo)準(zhǔn)CANopen模式
報(bào)文:ID:0x601數(shù)據(jù):2F 00 24 00 03 00 00 00,設(shè)置模塊為標(biāo)準(zhǔn)CANopen模式。
 重新上電后,配置生效。
重新上電后,配置生效。
2、標(biāo)準(zhǔn)CANopen模式使用
(1)節(jié)點(diǎn)狀態(tài)
GCAN-4057模塊滿足標(biāo)準(zhǔn)CANopen CiA 301協(xié)議,是標(biāo)準(zhǔn)的CANopen從站設(shè)備。GCAN-4057啟動(dòng)后將主動(dòng)發(fā)出一幀數(shù)據(jù)給主站,幀ID為0x700+Node ID。
例如:默認(rèn)GCAN-4057的Node ID為1(以下節(jié)點(diǎn)號(hào)均為1),則主站設(shè)備可接收到一條節(jié)點(diǎn)狀態(tài)數(shù)據(jù),幀ID為0x701,幀數(shù)據(jù)為0x7F。

對(duì)象字典0x100C,節(jié)點(diǎn)守護(hù)時(shí)間,默認(rèn)為0,默認(rèn)不開啟超時(shí)功能;對(duì)象字典0x100D,Life Time Factor,默認(rèn)為3。
0x100C和0x100D通過SDO配置后,主站主動(dòng)發(fā)送命令來詢問從站節(jié)點(diǎn)的狀態(tài)(Node Guarding),節(jié)點(diǎn)守護(hù)命令幀ID為0x700+Node ID,遠(yuǎn)程幀。若從站4057收不到主站的節(jié)點(diǎn)保護(hù)報(bào)文,延遲100C(ms)*100D時(shí)間后,從站進(jìn)入Pre-operational模式,并停止所有輸出。

(2)NMT狀態(tài)切換
GCAN-4057模塊接收由主站發(fā)出的操作指令,幀ID為0x000,DLC為2,幀數(shù)據(jù)第一個(gè)字節(jié)為命令符,第二個(gè)字節(jié)為節(jié)點(diǎn)號(hào)(若為00則控制全部節(jié)點(diǎn))。
例如:GCAN-4057的Node ID為1,命令GCAN-4057為進(jìn)入操作狀態(tài)(01),則NMT命令幀ID為0x000,幀數(shù)據(jù)為0x01,0x01。主站發(fā)送數(shù)據(jù)01 01,GCAN-4057模塊進(jìn)入05啟動(dòng)狀態(tài)。

(3)PDO命令
GCAN-4057模塊采用PDO(Process Data Object,過程數(shù)據(jù)對(duì)象)對(duì)數(shù)字量信號(hào)進(jìn)行采集或?qū)懭胼敵觥I、DO每一路的具體位置均可自由配置,其中,TPDO1用于表示數(shù)字量DI狀態(tài),幀ID為0x180+Node ID,默認(rèn)幀數(shù)據(jù)第一個(gè)字節(jié)為數(shù)字量輸入狀態(tài)。
TPDO1:

第8路在高位,第1路在低位。例如,GCAN-4057模塊節(jié)點(diǎn)號(hào)設(shè)為1。此時(shí)第一路狀態(tài)為1,其余DI狀態(tài)均為0。則CAN總線主站一端接收的DI狀態(tài)數(shù)據(jù)為0x01。

如需要控制(寫入)GCAN-4057模塊數(shù)字量輸出的狀態(tài),需接收RPDO1命令(由主站發(fā)出的),幀ID為0x200+Node ID,數(shù)據(jù)長(zhǎng)度為1,幀數(shù)據(jù)第一個(gè)字節(jié)為需要設(shè)置的數(shù)字量輸出狀態(tài)。
RPDO1用于表示改變(寫入)數(shù)字量輸出的狀態(tài),幀ID為0x200+Node ID,數(shù)字量輸出默認(rèn)由一個(gè)字節(jié)來控制(寫入),第8路在高位,第1路在低位。RPDO1:
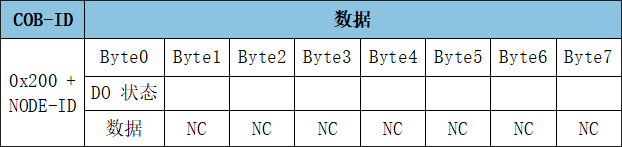
第8路在高位,第1路在低位。例如,GCAN-4057模塊節(jié)點(diǎn)號(hào)設(shè)為1。若需要設(shè)置DO4狀態(tài)為1,其余DO狀態(tài)均為0,則CAN總線主站一端發(fā)送的幀ID為0x201,幀數(shù)據(jù)為0x08。

3、SDO命令
服務(wù)數(shù)據(jù)對(duì)象SDO(ServiceDataObjects)主要用來訪問節(jié)點(diǎn)的對(duì)象字典,當(dāng)前標(biāo)準(zhǔn)CANopen模式也可以直接對(duì)GCAN-4057的參數(shù)進(jìn)行讀寫配置。請(qǐng)參照第6章配置相關(guān)參數(shù),配置后重新上電生效。
十、CAN模式配置及使用
請(qǐng)注意:CAN模式下只有數(shù)據(jù)收發(fā),無法配置相關(guān)參數(shù)。若想重新配置參數(shù),請(qǐng)復(fù)位進(jìn)入默認(rèn)或在標(biāo)準(zhǔn)CANopen模式下重新配置。
1、配置操作舉例
CAN模式操作舉例:(以節(jié)點(diǎn)號(hào)為1舉例)默認(rèn)模式上電后:
1、模塊配置為CAN模式
報(bào)文:ID:0x601數(shù)據(jù):2F 00 24 00 01 00 00 00,設(shè)置模塊為CAN模式。

重新上電后,配置生效。請(qǐng)注意:CAN模式下只有數(shù)據(jù)收發(fā),無法配置相關(guān)參數(shù)。若想重新配置參數(shù),請(qǐng)?jiān)O(shè)備復(fù)位后進(jìn)入CANopen模式重新配置。
2、默認(rèn)參數(shù)使用
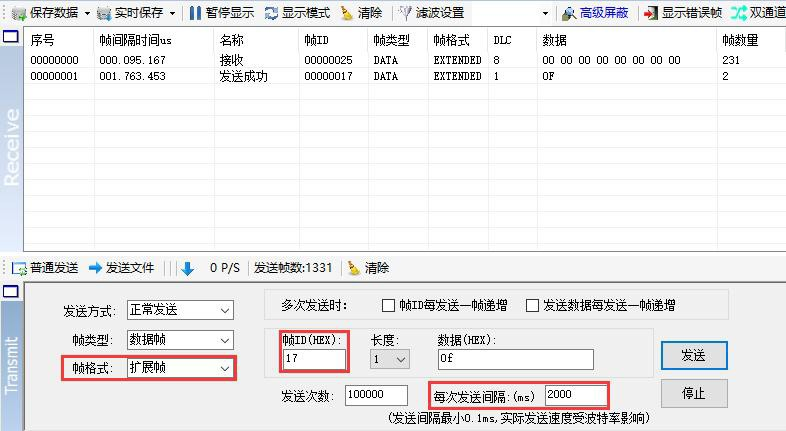
GCAN-4057模塊通過0x2400配置為CAN模式,其他參數(shù)為默認(rèn)值(默認(rèn)幀數(shù)據(jù)第一個(gè)字節(jié)為數(shù)字量輸入/輸出狀態(tài),第8路輸入/輸出在高位,第1路輸入/輸出在低位),重新上電,CAN模式的數(shù)據(jù)收發(fā)如圖所示。
輸入幀ID指的是輸入DI的ID,默認(rèn)0x00000025;輸出幀ID指的是可通過該ID控制DO的輸出,默認(rèn)為0x00000017,擴(kuò)展幀有效。數(shù)據(jù)0F為設(shè)置前4路有輸出。超時(shí)時(shí)間默認(rèn)2S,即2S后GCAN-4057停止輸出,若需要持續(xù)輸出,發(fā)送間隔應(yīng)小于等于2S。
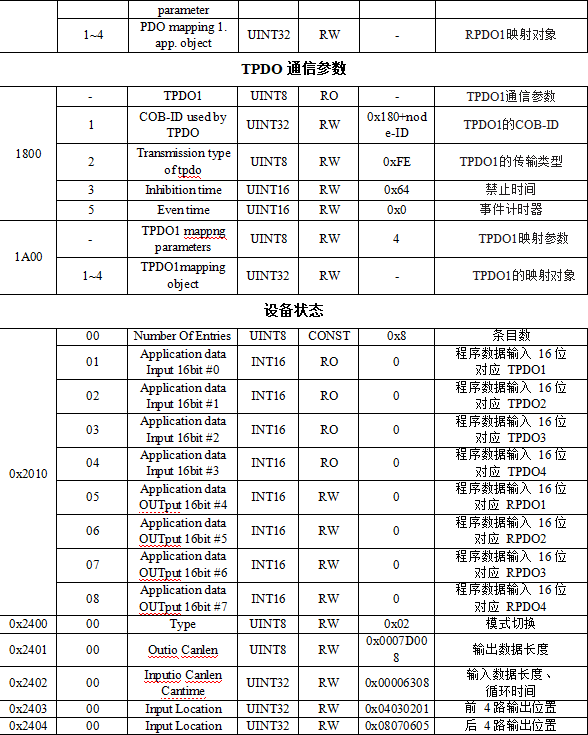
十一、對(duì)象字典

十二、技術(shù)規(guī)格
-

沈陽(yáng)廣成科技GCAN-4057模塊的設(shè)備參數(shù)包括:
(1)CAN-bus支持CAN2.0A和CAN2.0B幀格式,符合ISO/DIS 11898規(guī)范;(2)CAN-bus通訊波特率在10Kbps~1Mbps之間任意可編程;(3)CAN-bus接口采用電氣隔離,隔離模塊絕緣電壓:1500V DC;(4)使用9~30V DC供電,140mA(靜默態(tài)電流:40mA);(5)數(shù)字量輸入通道數(shù):8路;(6)數(shù)字量輸出通道數(shù):8路;(7)數(shù)字量輸入信號(hào):支持PNP型、NPN型,通過COM端切換;(8)數(shù)字量輸入高電平信號(hào)(數(shù)字1):+5V~30V;(9)數(shù)字量輸入低電平信號(hào)(數(shù)字0):≤+3V;(10)數(shù)字量輸出信號(hào):PNP輸出,單路最大500mA;8路同時(shí)輸出350mA/每路;(11)DI、DO、CANopen接口使用端子接口;(12)使用撥碼開關(guān)配置模塊波特率及節(jié)點(diǎn)號(hào);(13)靜電放電抗擾度等級(jí):接觸放電±4kV,空氣放電±8kV;(14)電快速瞬變脈沖群抗擾度等級(jí):電源接口、CAN接口±2kV;IO接口±1kV;(15)浪涌抗擾度等級(jí):電源接口、IO接口±1kV、CAN接口±4kV;(16)可用配套卡軌連接件,安裝到DIN卡軌上;(17)工作溫度范圍:-40℃~+85℃;- GCAN-PLC產(chǎn)品功能及應(yīng)用視頻:
OpenPCS軟件編程界面及工作窗口簡(jiǎn)介
OpenPCS軟件新建工程項(xiàng)目的方法
GCAN-PLC結(jié)構(gòu)及接線方法
使用GCAN-PLC控制多個(gè)步進(jìn)電機(jī)實(shí)現(xiàn)控制三軸運(yùn)動(dòng)平臺(tái)
GCAN-PLC通過CANopen協(xié)議控制多個(gè)伺服電機(jī)實(shí)現(xiàn)基本運(yùn)動(dòng)控制
GCAN-PLC例程視頻:
PLC跑馬燈實(shí)驗(yàn)及輸入輸出例程
CAN收發(fā)數(shù)據(jù)例程(ST)
OpenPCS軟件CAN及CANopen通訊例程
GCAN-PLC,Modbus主+Modbus從站例程(ST)
GCAN-PLC編程實(shí)例視頻:
GCAN-PLC的CAN總線例程介紹及編程實(shí)例
GCAN-PLC的串口通信例程介紹及Modbus-RTU協(xié)議編程實(shí)例
-
1、一體式PLC控制器系列
GCAN-PLC-200一體式可編程邏輯控制器
GCAN-PLC-210一體式可編程邏輯控制器
GCAN-PLC-220一體式可編程邏輯控制器
GCAN-PLC-230一體式可編程邏輯控制器
GCAN-PLC-240一體式可編程邏輯控制器
GCAN-PLC-310一體式可編程邏輯控制器
GCAN-PLC-324系列一體式可編程邏輯控制器
GCAN-PLC-326系列一體式可編程邏輯控制器
2、組合式PLC控制器系列
GCAN-PLC-301/302插片式可編程邏輯控制器
GCAN-PLC-320/321/322插片式可編程邏輯控制器
GCAN-PLC-325插片式可編程邏輯控制器
GCAN-PLC-400插片式可編程邏輯控制器
GCAN-PLC-425插片式ethercat通訊可編程邏輯控制器
GCAN-PLC-430插片式ethercat通訊可編程邏輯控制器
GCAN-PLC-510插片式可編程邏輯控制器
GCAN-PLC-511插片式可編程邏輯控制器
GCAN-PLC-521插片式可編程邏輯控制器
GCAN-PLC-522插片式可編程邏輯控制器
GCAN-PLC-530插片式ethercat通訊可編程邏輯控制器
GCAN-PLC-530C插片式ethercat通訊可編程邏輯控制器
GCAN-PLC-535插片式ethercat通訊可編程邏輯控制器
3、PLC開發(fā)板
GCAN-PLCcore-M7 PLC核心開發(fā)板
4、一體式總線IO耦合器
GCAN-4032 分布式CANopen遠(yuǎn)程IO
GCAN-4038 8路模擬量輸入CANopen IO耦合器
GCAN-4048 8路熱電偶輸入CANopen IO耦合器
GCAN-4055 8路數(shù)字量輸入8路數(shù)字量輸出CANopen IO耦合器
GCAN-4056 8路數(shù)字量輸入8路數(shù)字量輸出CANopen IO耦合器
GCAN-4057 8路數(shù)字量輸入8路數(shù)字量輸出CANopen IO耦合器
GCAN-4068 8路4-20mA電流輸出CANopen IO耦合器
GCAN-4128 4路數(shù)字量輸入4路數(shù)字量輸出CANopen IO耦合器
GCAN-5032 分布式EtherCAT遠(yuǎn)程IO
GCAN-6057 8路數(shù)字量輸入8路數(shù)字量輸出CANopen IO耦合器
5、組合式總線IO耦合器
GCAN-8000插片式CANopen IO耦合器
GCAN-8001組合式CANopen IO耦合器
GCAN-8100插片式modbus IO耦合器
GCAN-8101組合式Modbus IO耦合器
GCAN-8200插片式ethercat IO耦合器
GCAN-8201插片式ethercat IO耦合器
GCAN-8300插片式profinet IO耦合器
6、插片式IO擴(kuò)展模塊
GC-1008 8路PNP數(shù)字量輸入IO模塊
GC-1016 16路PNP數(shù)字量輸入IO模塊
GC-1018 8路NPN數(shù)字量輸入IO模塊
GC-1502 2路計(jì)數(shù)器輸入IO模塊
GC-1602 2通道AB相計(jì)數(shù)模塊
GC-2008 8路PNP數(shù)字量輸出IO模塊
GC-2016 16路PNP數(shù)字量輸出IO模塊
GC-2018 8路NPN數(shù)字量輸出IO模塊
GC-2204 4路繼電器輸出IO模塊
GC-2214 4路繼電器輸出IO模塊
GC-2302 2路PWM脈沖輸出IO模塊
GC-3604 4路-5V-+5V電壓輸入IO模塊
GC-3624 4路-10V-+10V電壓輸入IO模塊
GC-3644 4路0-20mA電流輸入IO模塊
GC-3654 4路4-20mA電流輸入IO模塊
GC-3664 4路0-+5V電壓輸入IO模塊
GC-3674 4路0-+10V電壓輸入IO模塊
GC-3804 4路PT100溫度輸入IO模塊
GC-3814 4路PT1000溫度輸入IO模塊
GC-3822 2路PT100溫度輸入IO模塊
GC-3832 2路PT1000溫度輸入IO模塊
GC-3844 4路K型熱電偶輸入IO模塊
GC-3854 4路S型熱電偶輸入IO模塊
GC-3864 4路T型熱電偶輸入IO模塊
GC-3874 4路J型熱電偶輸入IO模塊
GC-4602 2路-5V-+5V電壓輸出IO模塊
GC-4622 2路-10V-+10V電壓輸出IO模塊
GC-4642 2路0-20mA電流輸出IO模塊
GC-4652 2路4-20mA電流輸出IO模塊
GC-4662 2路0-+5V電壓輸出IO模塊
GC-4672 2路0-+10V電壓輸出IO模塊
GC-4674 4路0-+10V電壓輸出IO模塊
GC-4684 4路0-+10V電壓輸出IO模塊
GC-6101 RS232 485通訊模塊
GC-6221 4G通訊模塊
GC-6501 WIFI通訊模塊 
我置頂")